Alexander Liniger
I am a principal researcher at the Huawei Research Center in Zurich, working on machine learning and computer vision.
Research: My research focuses on the intersection of computer vision, machine learning, and control theory. On one side, I am interested in representations that enable the efficient combination of scene understanding and decision-making algorithms. These can vary from bird's eye view scene and map understanding in autonomous driving to using NeRFs for active 3D reconstruction. On the other side, I am interested in learning safe multi-agent policies directly from data, using principles from control and game theory to guide the learning process. Such methods can, for example, directly learn driving policies from human driving data and can be used for motion prediction, interactive motion planning, or data-driven simulation. The combination of better representations and policy learning will allow us to develop models that pave the path for truly autonomous robotic systems.
Bio: I studied Mechanical Engineering at ETH Zurich, where I got my BSc and MSc in 2010 and 2013 respectively. In 2013 I started my PhD at the Automatic Control Lab at ETH Zurich under the supervision of John Lygeros, where I was working on safe and game theoretic motion planning for autonomous driving and autonomous racing. After finishing my PhD in 2018, I first worked as a PostDoc at the Automatic Control Lab before joining the Computer Vision Lab (CVL) at ETH Zurich in Luc Van Gool's group in 2019. During my time at CVL, I was working within the TRACE Toyota autonomous driving project, focusing on scene understanding for autonomous driving as well as imitation and reinforcement learning. During my time at CVL, I also started the lecture Deep Learning for Autonomous Driving together with Dengxin Dai, which we were teaching for three years with great success. In 2021 I joined Zurich Huawei Research as a Principal Researcher.

Publications
Zhejun Zhang, Alexander Liniger, Christos Sakaridis, Fisher Yu, Luc Van Gool
Advances in Neural Information Processing Systems (NeurIPS), 2023
Project Page / Paper /
@InProceedings{zhang2023real,
author = {Zhejun Zhang and Alexander Liniger and Christos Sakaridis and Fisher Yu and Luc Van Gool},
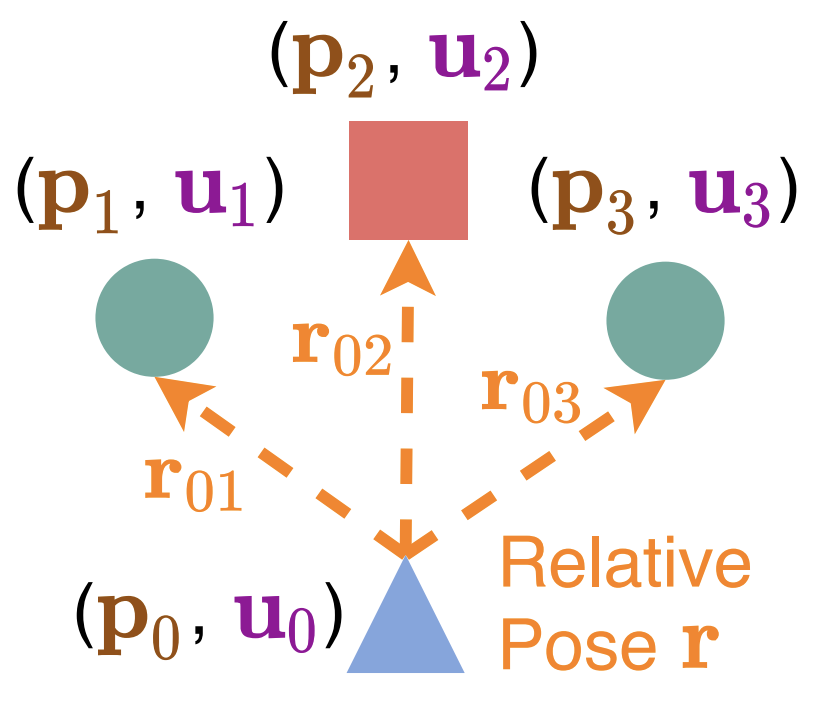
title = {Real-Time Motion Prediction via Heterogeneous Polyline Transformer with Relative Pose Encoding},
booktitle = {Advances in Neural Information Processing Systems (NeurIPS)},
year = {2023},
}
Lei Li, Alexander Liniger, Mario Millhaeusler, Vagia Tsiminaki, Yuanyou Li, Dengxin Dai
arXiv.org, 2023
Project Page / Paper /
@InProceedings{li2023cross,
author = {Lei Li and Alexander Liniger and Mario Millhaeusler and Vagia Tsiminaki and Yuanyou Li and Dengxin Dai},
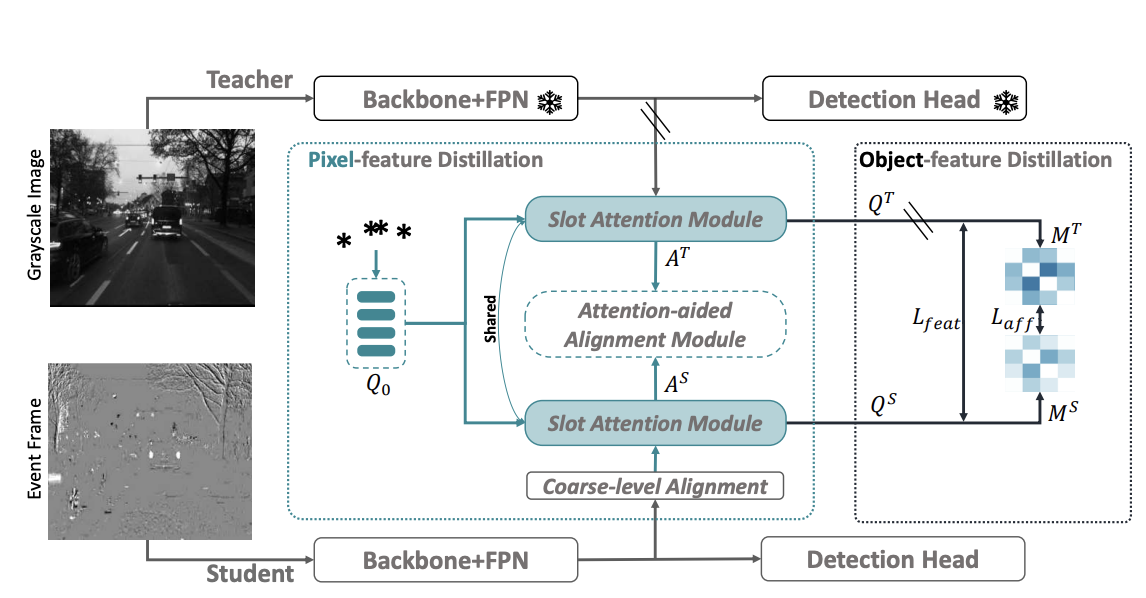
title = {Object-centric Cross-modal Feature Distillation for Event-based Object Detection},
booktitle = {arXiv.org},
year = {2023},
}
Andrea Boscolo Camiletto, Alfredo Bochicchio, Alexander Liniger, Dengxin Dai, Abel Gawel
arXiv.org, 2023
Project Page / Paper /
@InProceedings{camiletto2023ubev,
author = {Andrea Boscolo Camiletto and Alfredo Bochicchio and Alexander Liniger and Dengxin Dai and Abel Gawel},
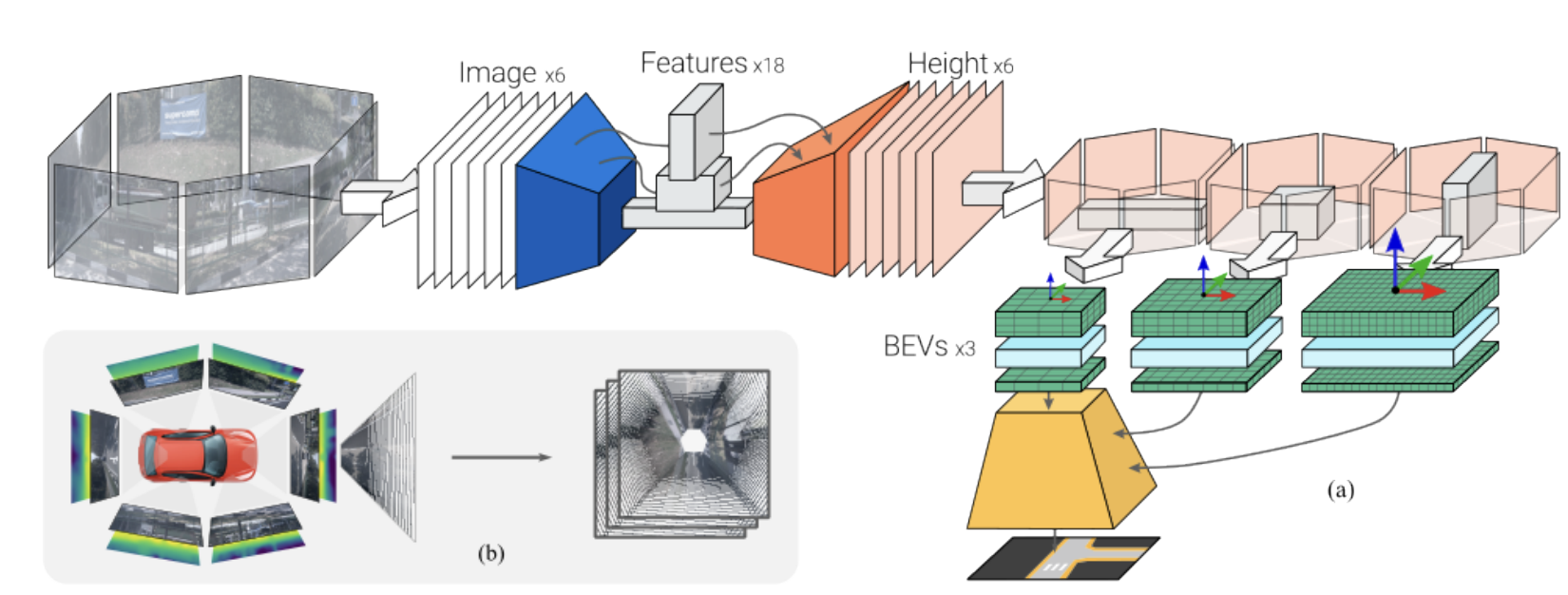
title = {U-BEV: Height-aware Bird's-Eye-View Segmentation and Neural Map-based Relocalization},
booktitle = {arXiv.org},
year = {2023},
}
Ayoub Raji, Danilo Caporale, Francesco Gatti, Andrea Giove, Micaela Verucchi, Davide Malatesta, Nicola Musiu, Alessandro Toschi, Silviu Popitanu, Fabio Bagni, Massimiliano Bosi, Alexander Liniger, Marko Bertogna, Daniele Morra, Francesco Amerotti, Luca Bartoli, Federico Martello, Riccardo Porta
Field Robotics Journal, 2023
Project Page / Paper /
@InProceedings{raji2023erautopilot,
author = {Ayoub Raji and Danilo Caporale and Francesco Gatti and Andrea Giove and Micaela Verucchi and Davide Malatesta and Nicola Musiu and Alessandro Toschi and Silviu Popitanu and Fabio Bagni and Massimiliano Bosi and Alexander Liniger and Marko Bertogna and Daniele Morra and Francesco Amerotti and Luca Bartoli and Federico Martello and Riccardo Porta},
title = {er.autopilot 1.0: The Full Autonomous Stack for Oval Racing at High Speeds},
booktitle = {Field Robotics Journal},
year = {2023},
}
Yigit Can, Alexander Liniger, Danda Paudel, Luc Van Gool
Proc. of the IEEE International Conf. on Computer Vision (ICCV), 2023
Project Page / Paper /
@InProceedings{can2023improving,
author = {Yigit Can and Alexander Liniger and Danda Paudel and Luc Van Gool},
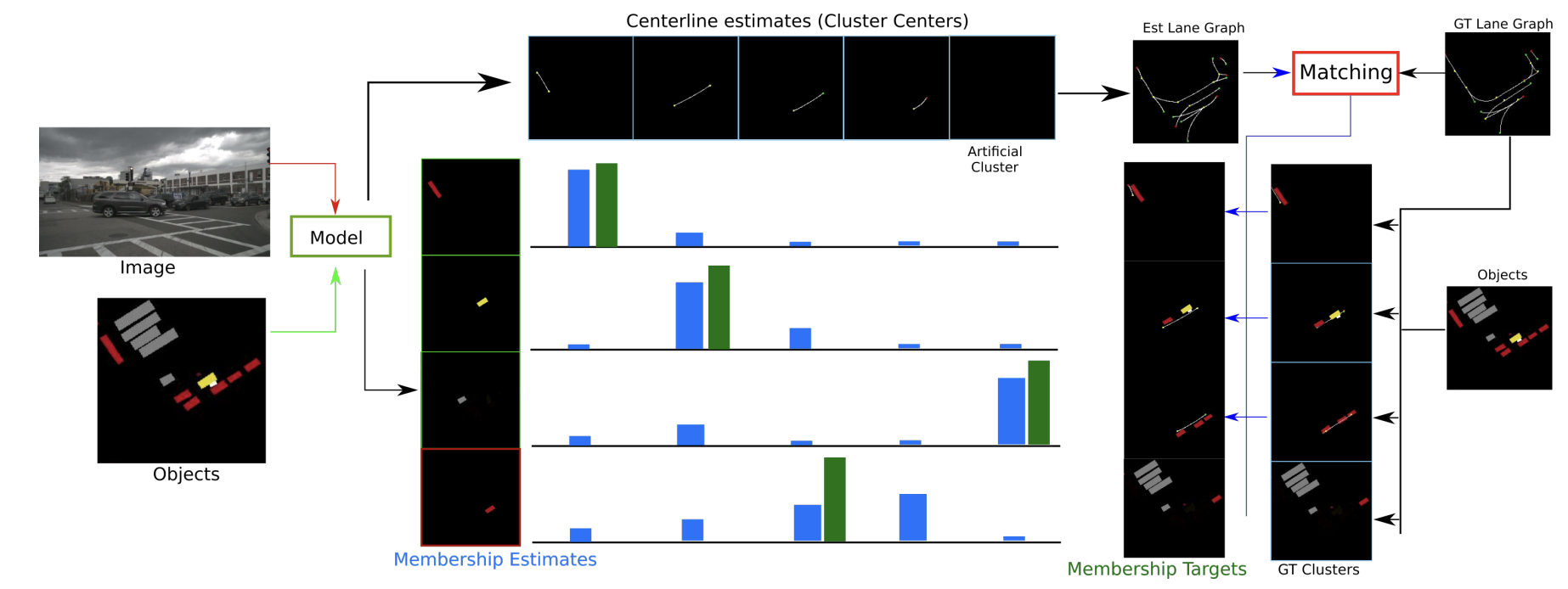
title = {Improving online lane graph extraction by object-lane clustering},
booktitle = {Proc. of the IEEE International Conf. on Computer Vision (ICCV)},
year = {2023},
}
Yigit Can, Alexander Liniger, Danda Paudel, Luc Van Gool
International Conference on Intelligent Transportation Systems (ITSC), 2023
Project Page / Paper /
@InProceedings{can2023online,
author = {Yigit Can and Alexander Liniger and Danda Paudel and Luc Van Gool},
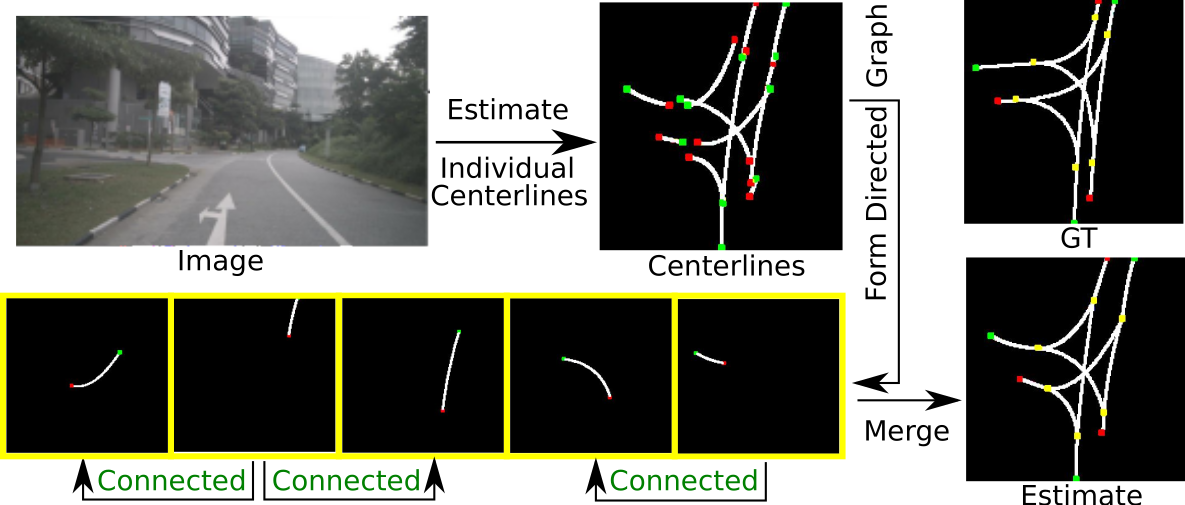
title = {Online Lane Graph Extraction from Onboard Video},
booktitle = {International Conference on Intelligent Transportation Systems (ITSC)},
year = {2023},
}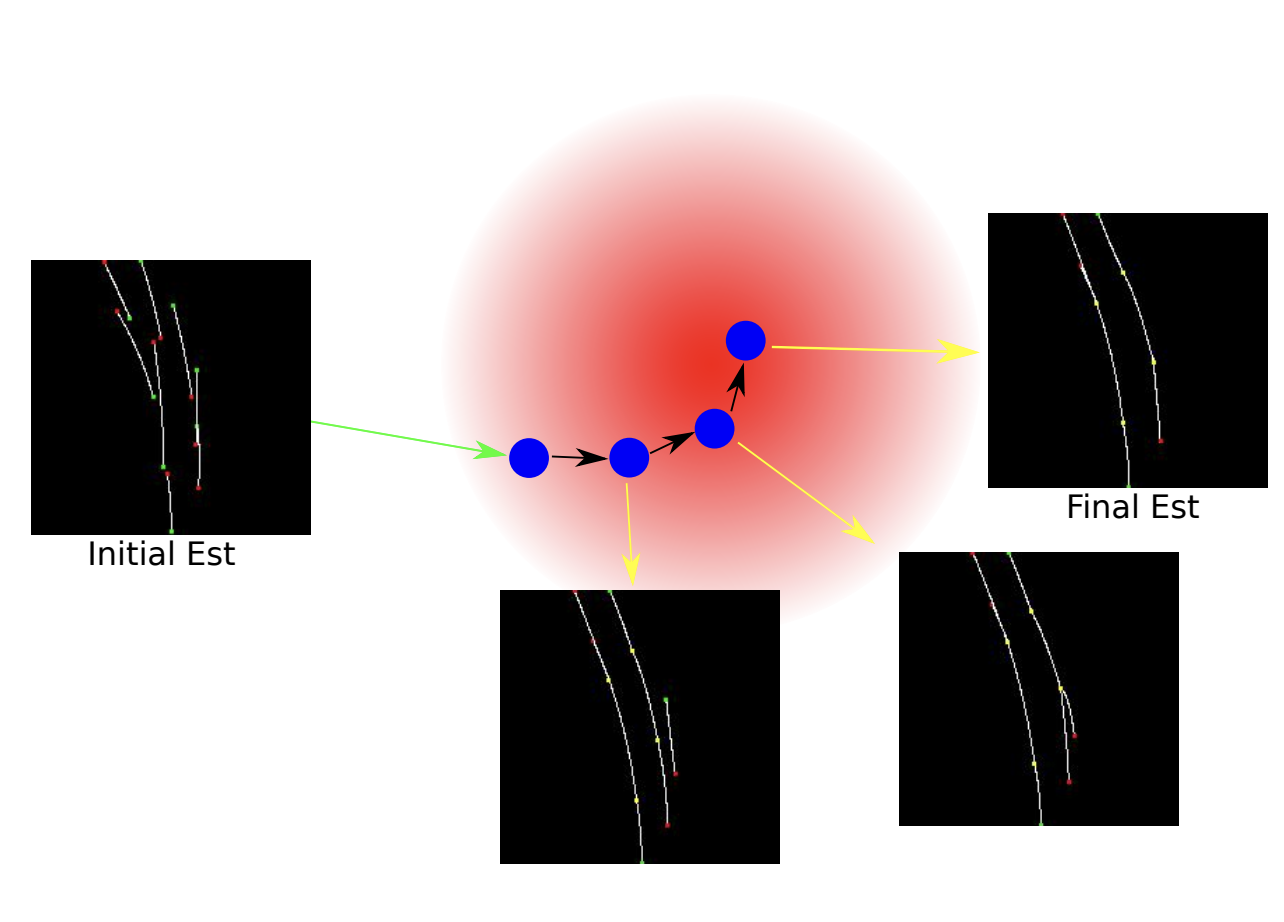
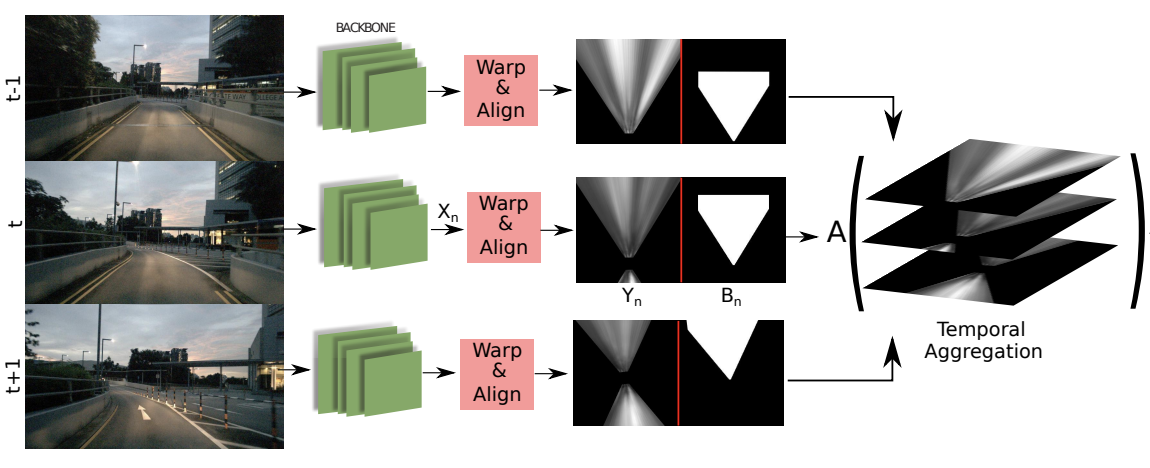
Yigit Can, Alexander Liniger, Danda Paudel, Luc Van Gool
International Conference on Intelligent Transportation Systems (ITSC), 2023
Project Page / Paper /
@InProceedings{can2023prior,
author = {Yigit Can and Alexander Liniger and Danda Paudel and Luc Van Gool},
title = {Prior Based Online Lane Graph Extraction from Single Onboard Camera Image},
booktitle = {International Conference on Intelligent Transportation Systems (ITSC)},
year = {2023},
}
Nick Bührer, Zhejun Zhang, Alexander Liniger, Fisher Yu, Luc Van Gool
International Conference on Intelligent Robots and Systems (IROS), 2023
Project Page / Paper /
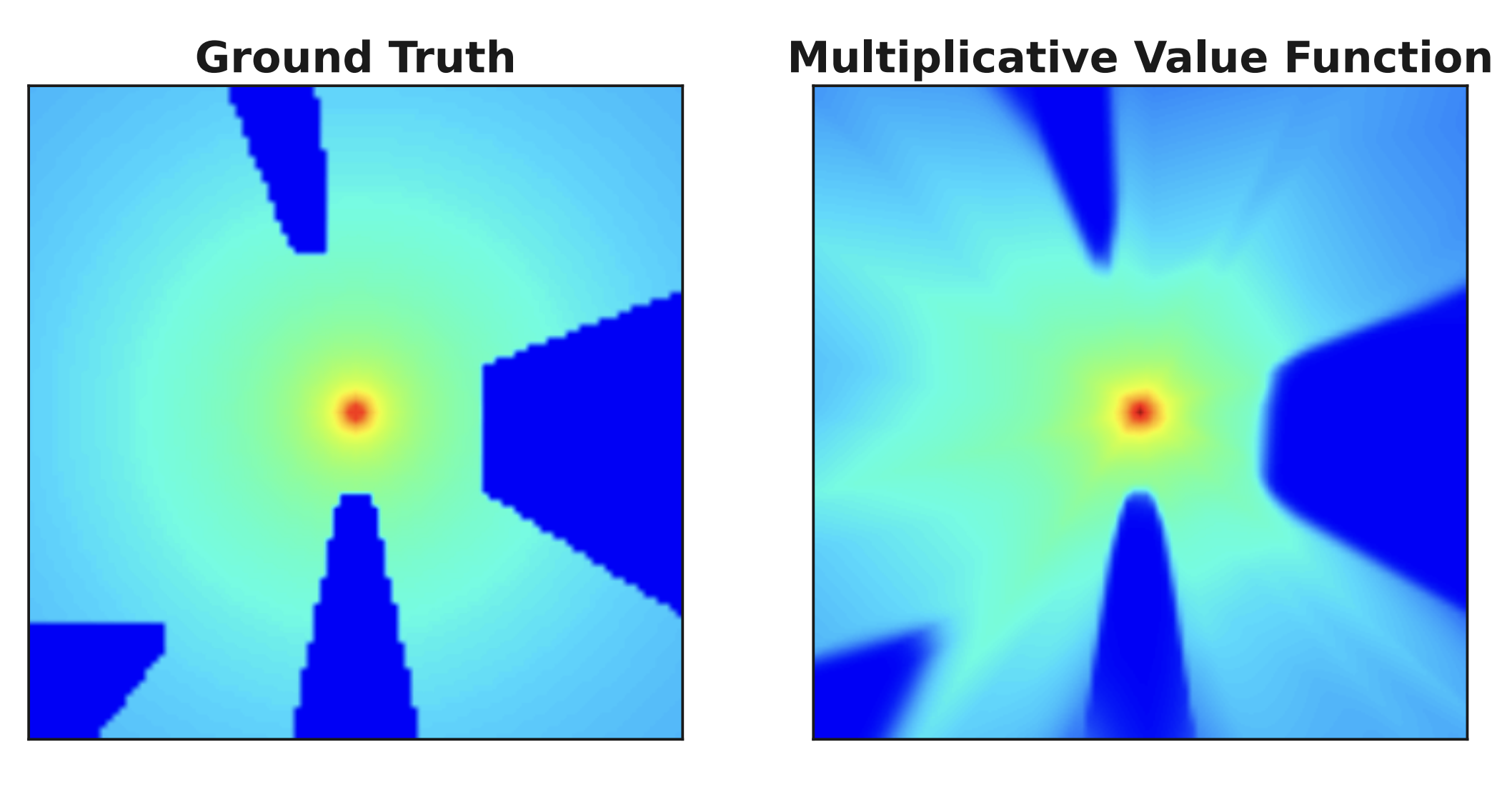
@InProceedings{buhrer2023multiplicative,
author = {Nick Bührer and Zhejun Zhang and Alexander Liniger and Fisher Yu and Luc Van Gool},
title = {A Multiplicative Value Function for Safe and Efficient Reinforcement Learning},
booktitle = {International Conference on Intelligent Robots and Systems (IROS)},
year = {2023},
}
Zhejun Zhang, Alexander Liniger, Dengxin Dai, Fisher Yu, Luc Van Gool
International Conference on Robotics and Automation (ICRA), 2023
Project Page / Paper /
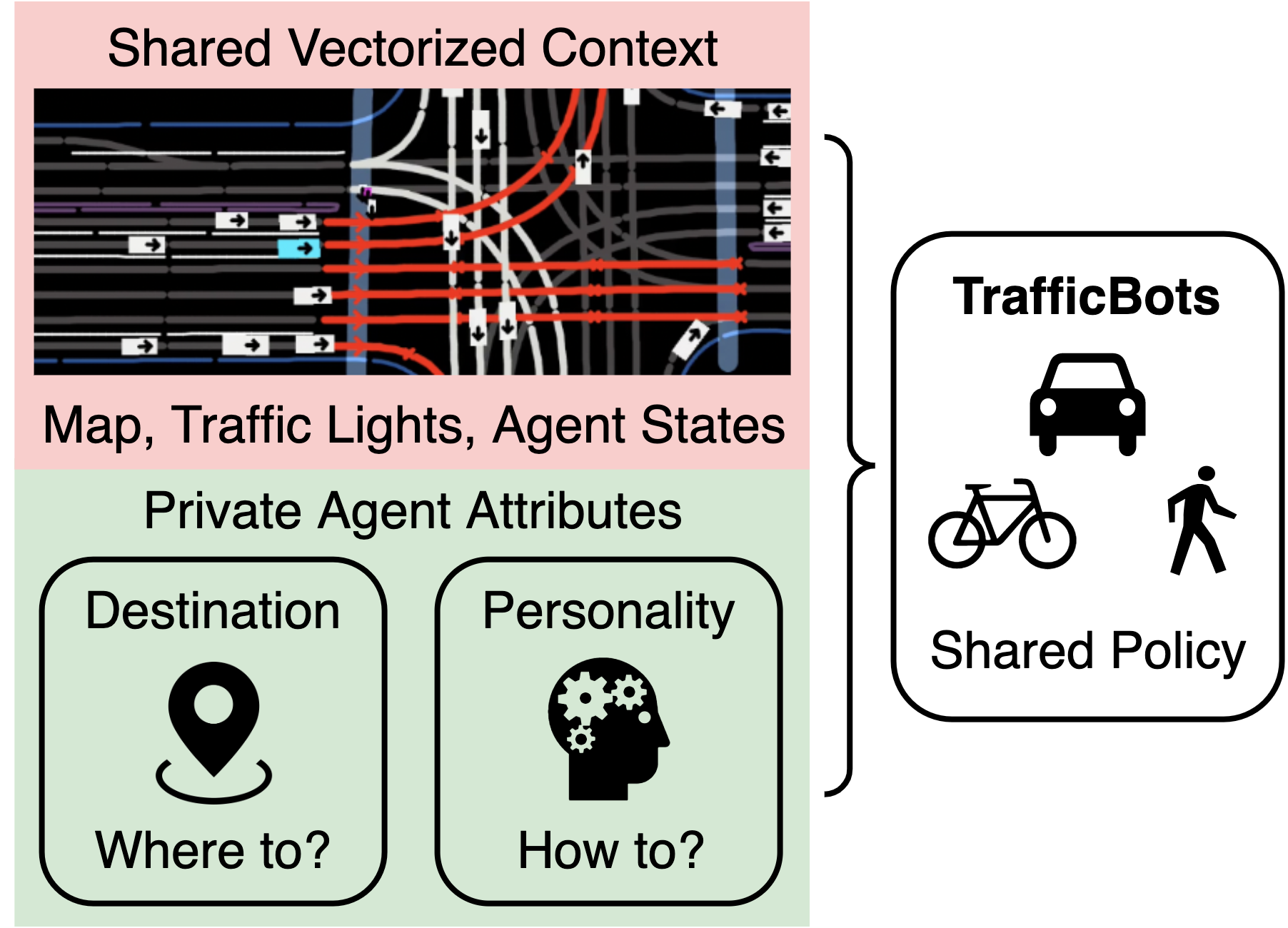
@InProceedings{zhang2023trafficbots,
author = {Zhejun Zhang and Alexander Liniger and Dengxin Dai and Fisher Yu and Luc Van Gool},
title = {TrafficBots: Towards World Models for Autonomous Driving Simulation and Motion Prediction},
booktitle = {International Conference on Robotics and Automation (ICRA)},
year = {2023},
}
Yigit Can, Alexander Liniger, Danda Paudel, Luc Van Gool
arXiv.org, 2022
Project Page / Paper /
@InProceedings{can2022piecewise,
author = {Yigit Can and Alexander Liniger and Danda Paudel and Luc Van Gool},
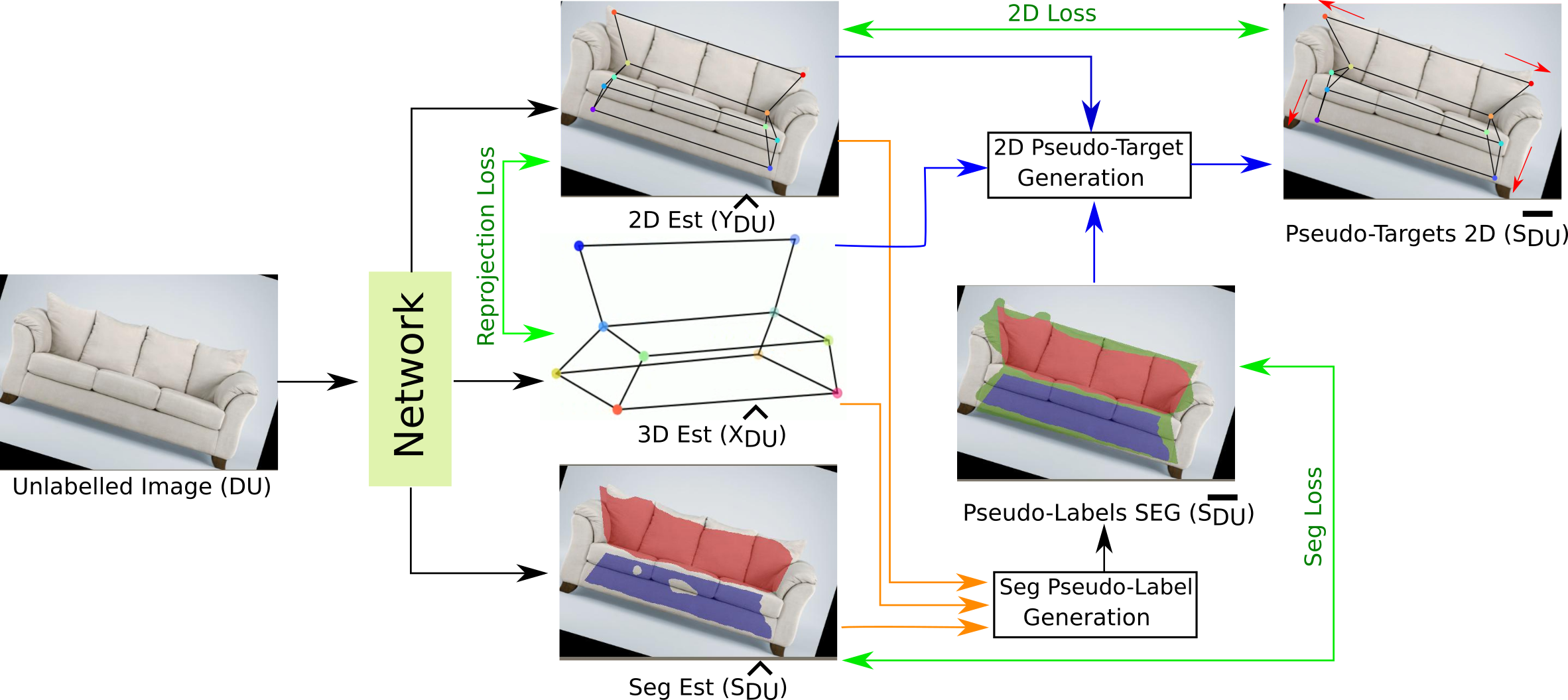
title = {Piecewise Planar Hulls for Semi-Supervised Learning of 3D Shape and Pose from 2D Images},
booktitle = {arXiv.org},
year = {2022},
}
Yigit Can, Alexander Liniger, Danda Paudel, Luc Van Gool
British Maschine Vision Conference (BMVC), 2022
Project Page / Paper / Code /
@InProceedings{can2021end,
author = {Yigit Can and Alexander Liniger and Danda Paudel and Luc Van Gool},
title = {End-to-End Learning of Multi-category 3D Pose and Shape Estimation},
booktitle = {British Maschine Vision Conference (BMVC)},
year = {2022},
}
Soomin Lee, Le Chen, Jiahao Wang, Alexander Liniger, Suryansh Kumar, Fisher Yu
IEEE Robotics and Automation Letters (RAL), 2022
Project Page / Paper / Video /
@InProceedings{lee2022uncertainty,
author = {Soomin Lee and Le Chen and Jiahao Wang and Alexander Liniger and Suryansh Kumar and Fisher Yu},
title = {Uncertainty Guided Policy for Active Robotic 3D Reconstruction Using Neural Radiance Fields},
booktitle = {IEEE Robotics and Automation Letters (RAL)},
year = {2022},
}Ayoub Raji, Alexander Liniger, Andrea Giove, Alessandro Toschi, Nicola Musiu, Daniele Morra, Micaela Verucchi, Danilo Caporale, Marko Bertogna
International Conference on Intelligent Transportation Systems (ITSC), 2022
Project Page / Paper /
@InProceedings{raji2022motion,
author = {Ayoub Raji and Alexander Liniger and Andrea Giove and Alessandro Toschi and Nicola Musiu and Daniele Morra and Micaela Verucchi and Danilo Caporale and Marko Bertogna},
title = {Motion Planning and Control for Multi Vehicle Autonomous Racing at High Speeds},
booktitle = {International Conference on Intelligent Transportation Systems (ITSC)},
year = {2022},
}
Ge-Peng Ji, Deng-Ping Fan, Yu-Cheng Chou, Dengxin Dai, Alexander Liniger, Luc Van Gool
Machine Intelligence Research, 2022
Project Page / Paper / Code /
@InProceedings{ji2022deep,
author = {Ge-Peng Ji and Deng-Ping Fan and Yu-Cheng Chou and Dengxin Dai and Alexander Liniger and Luc Van Gool},
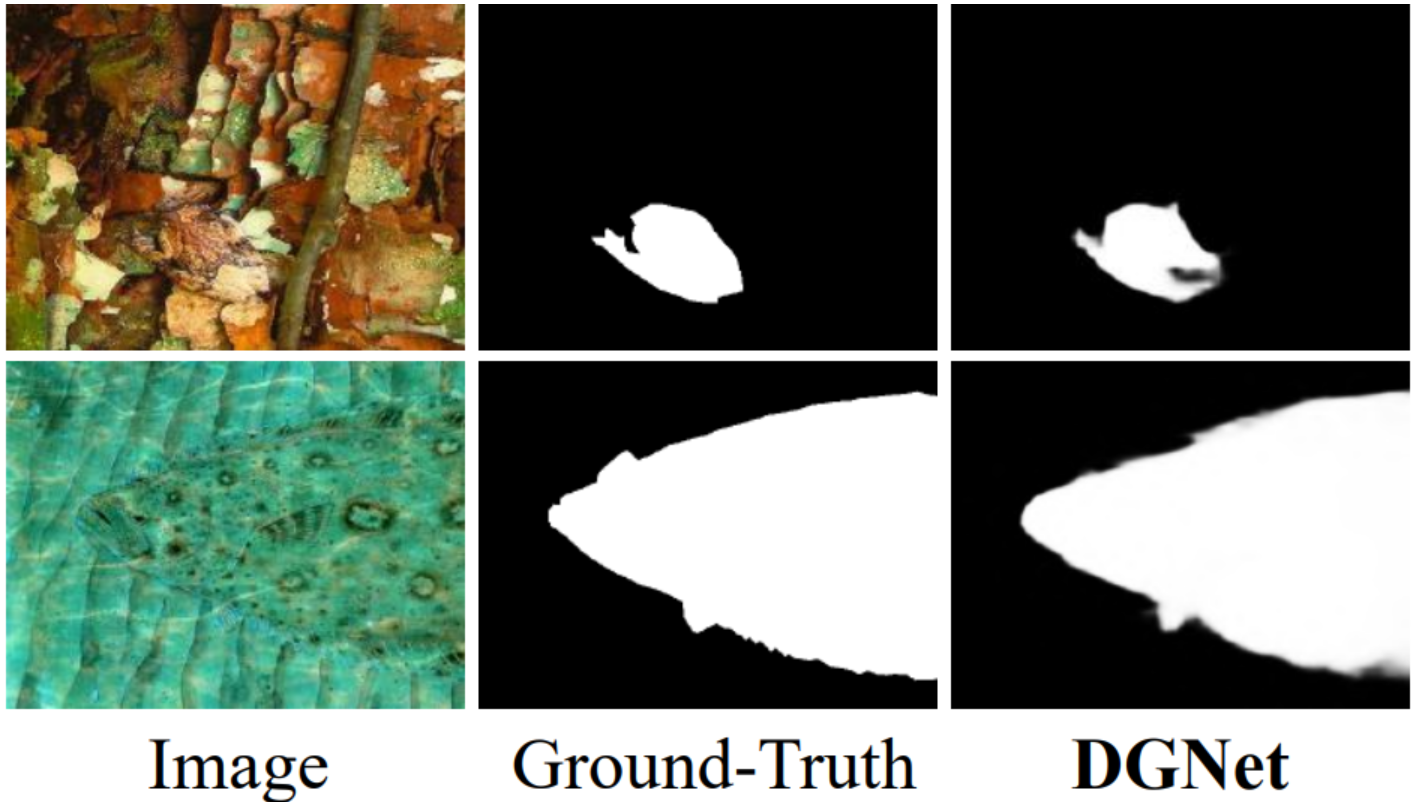
title = {Deep Gradient Learning for Efficient Camouflaged Object Detection},
booktitle = {Machine Intelligence Research},
year = {2022},
}
Johannes Betz, Hongrui Zheng, Alexander Liniger, Ugo Rosolia, Phillip Karle, Madhur Behl, Venkat Krovi, Rahul Mangharam
IEEE Open Journal of Intelligent Transportation Systems, 2022
Project Page / Paper /
@InProceedings{betz2022autonomous,
author = {Johannes Betz and Hongrui Zheng and Alexander Liniger and Ugo Rosolia and Phillip Karle and Madhur Behl and Venkat Krovi and Rahul Mangharam},
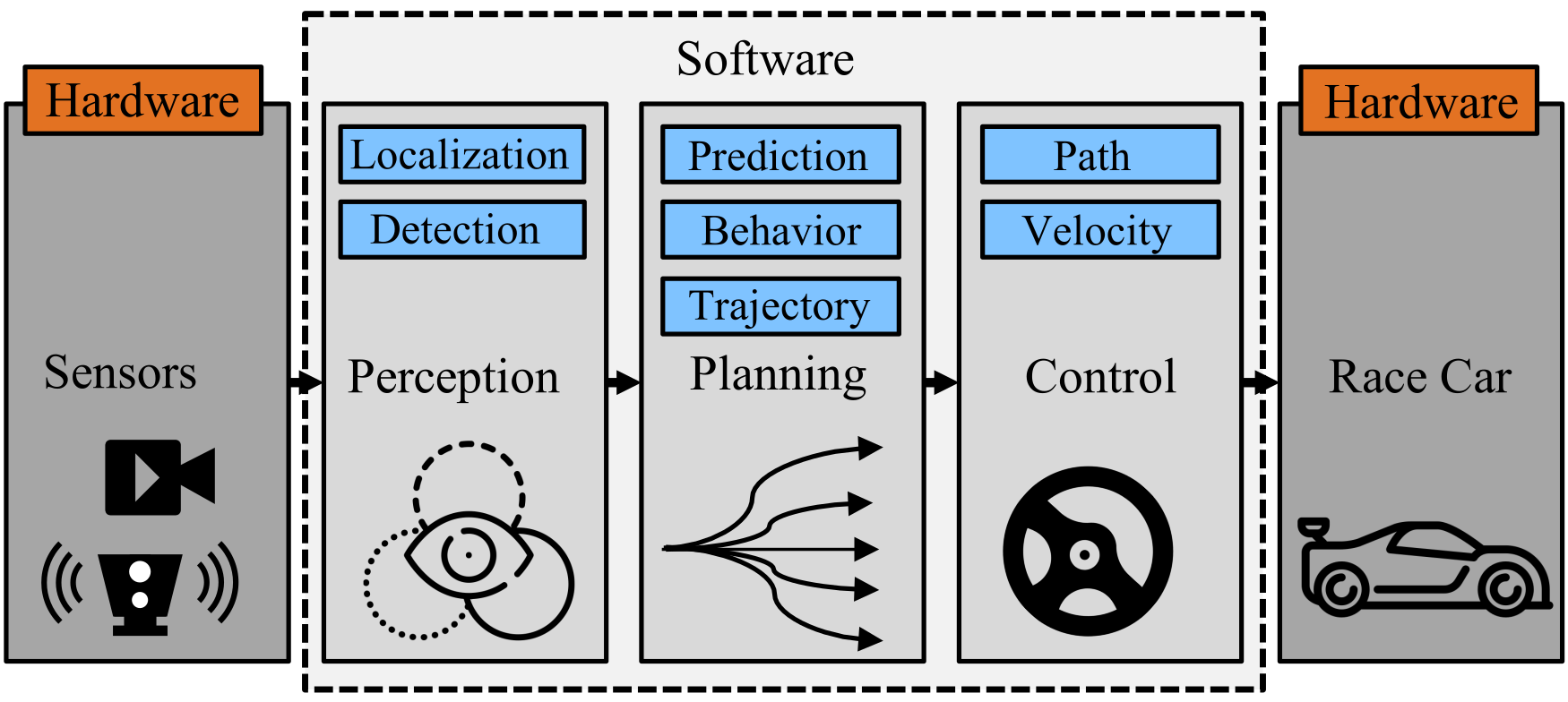
title = {Autonomous Vehicles on the Edge: A Survey on Autonomous Vehicle Racing},
booktitle = {IEEE Open Journal of Intelligent Transportation Systems},
year = {2022},
}
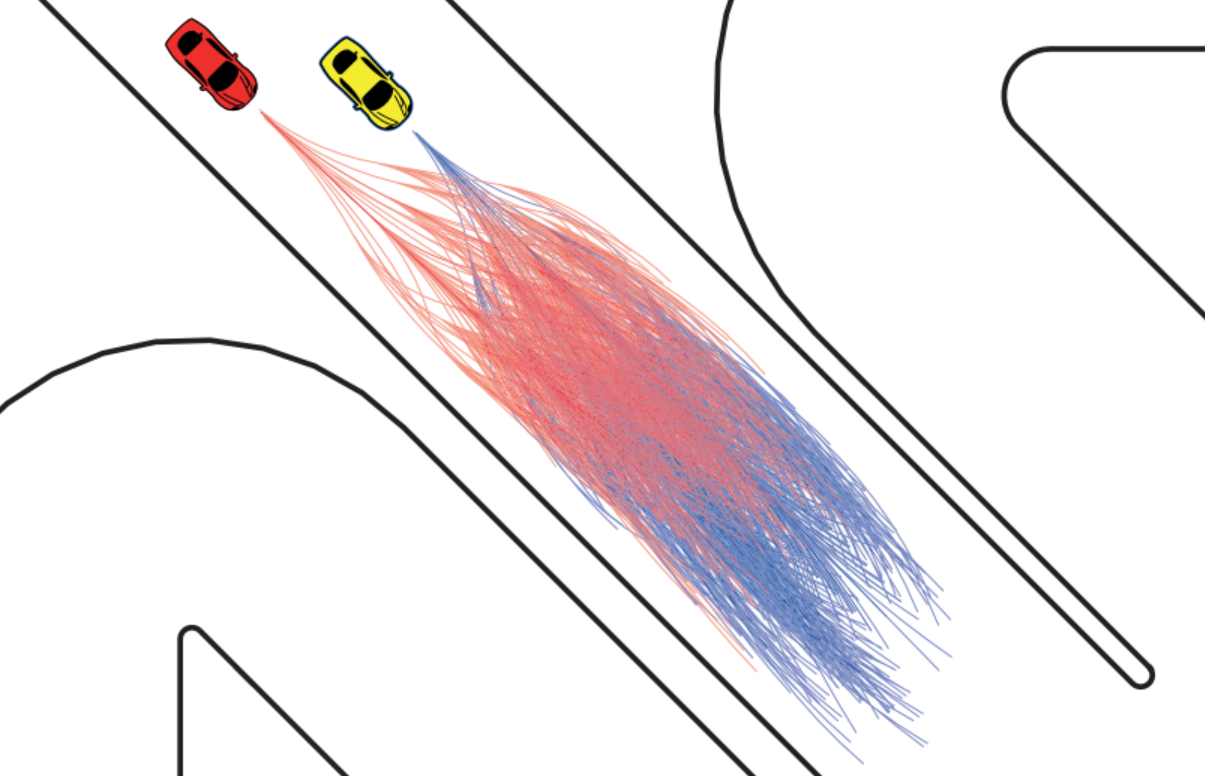
Jose Vazquez Espinoza, Alexander Liniger, Wilko Schwarting, Daniela Rus, Luc Van Gool
Learning for Dynamics and Control Conference, 2022
Project Page / Paper /
@InProceedings{vazquez2022deep,
author = {Jose Vazquez Espinoza and Alexander Liniger and Wilko Schwarting and Daniela Rus and Luc Van Gool},
title = {Deep Interactive Motion Prediction and Planning: Playing Games with Motion Prediction Models},
booktitle = {Learning for Dynamics and Control Conference},
year = {2022},
}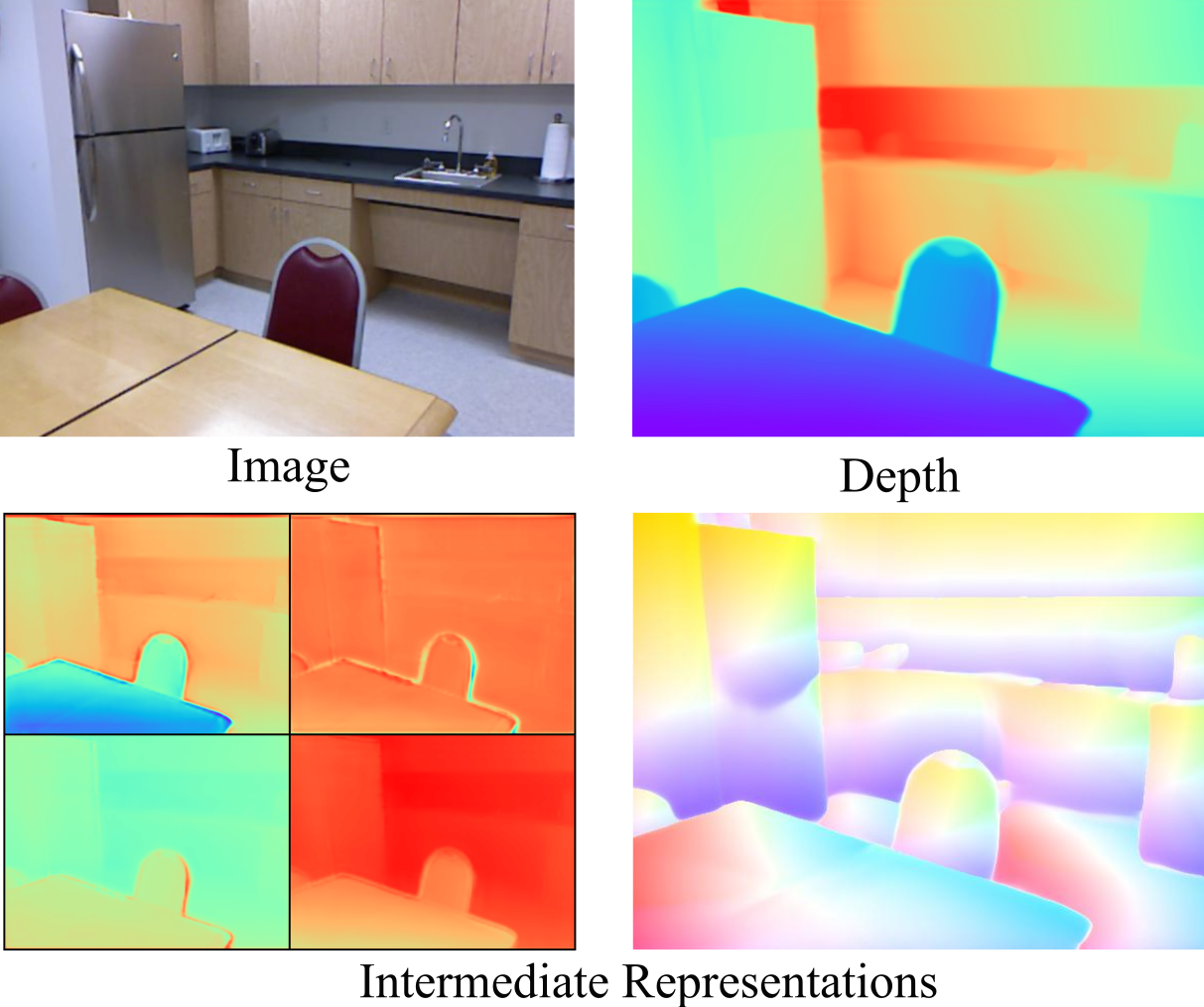
Vaishakh Patil, Christos Sakaridis, Alexander Liniger, Luc Van Gool
Proc. IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), 2022
Project Page / Paper / Code /
@InProceedings{patil2022p3depth,
author = {Vaishakh Patil and Christos Sakaridis and Alexander Liniger and Luc Van Gool},
title = {P3Depth: Monocular Depth Estimation with a Piecewise Planarity Prior},
booktitle = {Proc. IEEE Conf. on Computer Vision and Pattern Recognition (CVPR)},
year = {2022},
}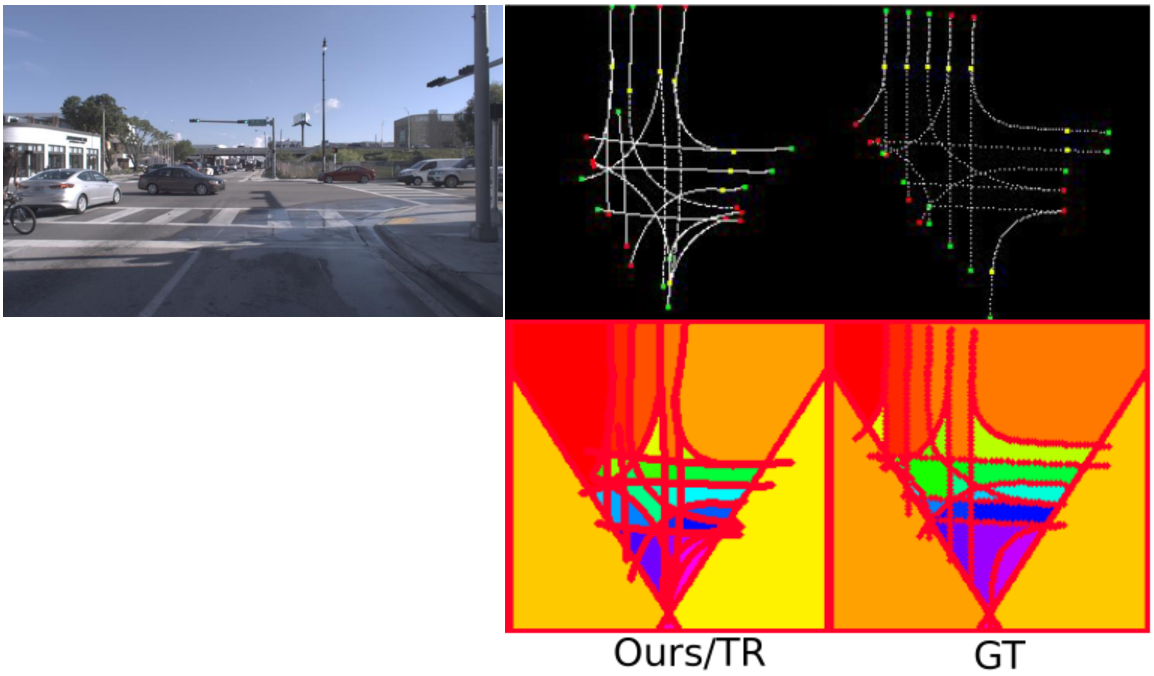
Yigit Can, Alexander Liniger, Danda Paudel, Luc Van Gool
Proc. IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), 2022
Project Page / Paper / Code /
@InProceedings{can2022topology,
author = {Yigit Can and Alexander Liniger and Danda Paudel and Luc Van Gool},
title = {Topology Preserving Local Road Network Estimation from Single Onboard Camera Image},
booktitle = {Proc. IEEE Conf. on Computer Vision and Pattern Recognition (CVPR)},
year = {2022},
}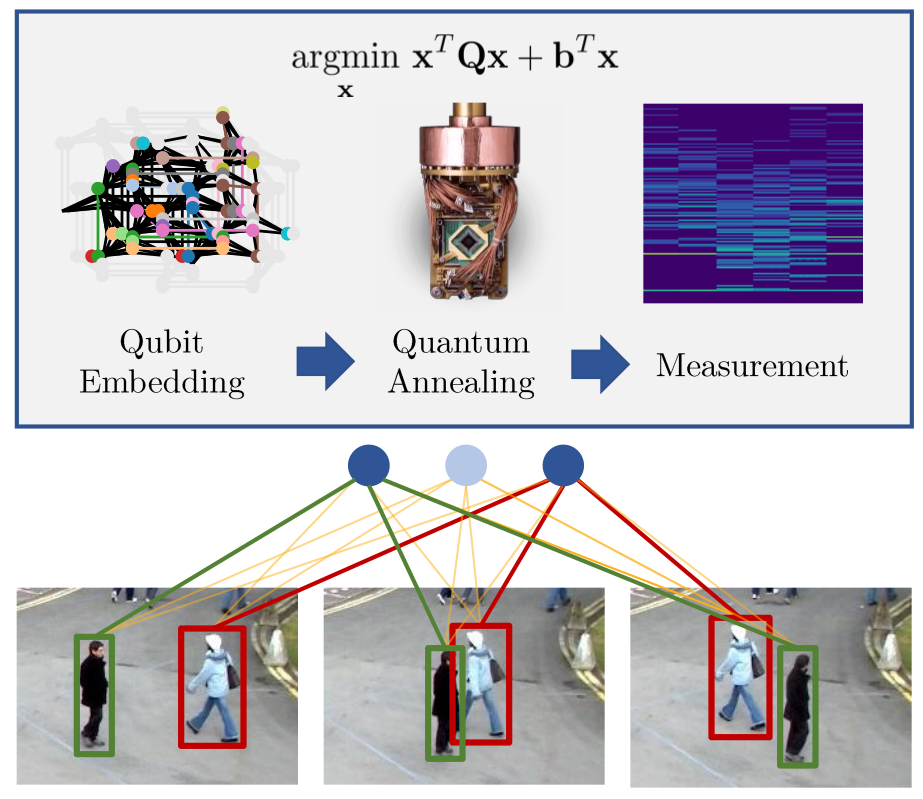
Jan-Nico Zaech, Alexander Liniger, Martin Danelljan, Dengxin Dai, Luc Van Gool
Proc. IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), 2022
Project Page / Paper /
@InProceedings{zaech2022adiabatic,
author = {Jan-Nico Zaech and Alexander Liniger and Martin Danelljan and Dengxin Dai and Luc Van Gool},
title = {Adiabatic Quantum Computing for Multi Object Tracking},
booktitle = {Proc. IEEE Conf. on Computer Vision and Pattern Recognition (CVPR)},
year = {2022},
}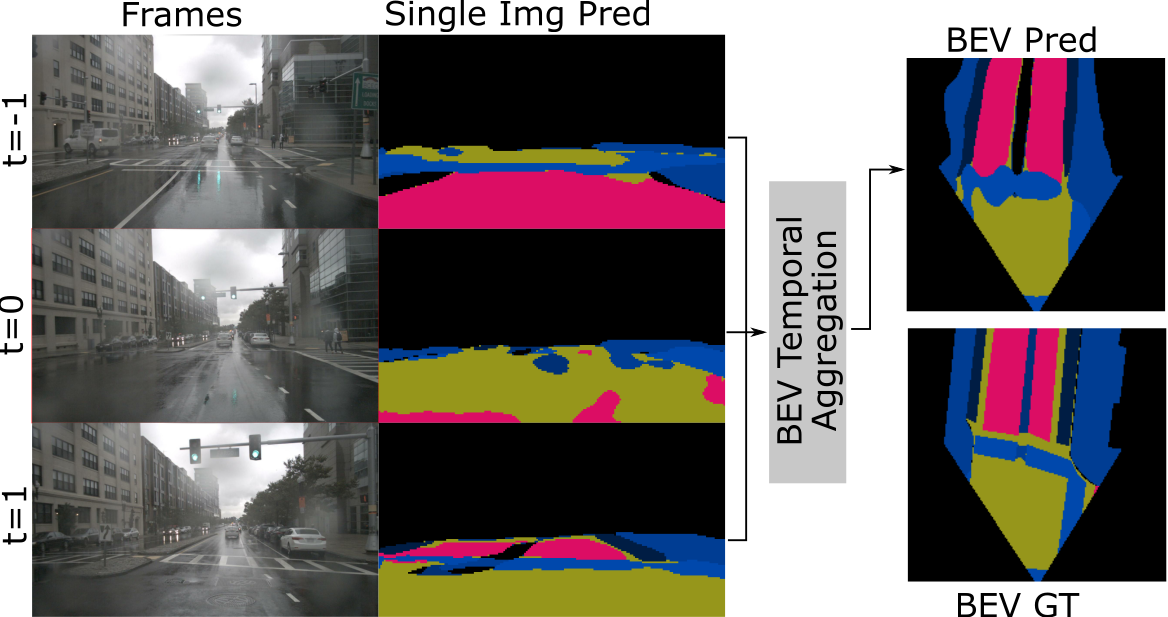
Yigit Can, Alexander Liniger, Ozan Unal, Danda Paudel, Luc Van Gool
IEEE Robotics and Automation Letters (RAL), 2022
Project Page / Paper / Code /
@InProceedings{can2022understanding,
author = {Yigit Can and Alexander Liniger and Ozan Unal and Danda Paudel and Luc Van Gool},
title = {Understanding Bird's-Eye View of Road Semantics using an Onboard Camera},
booktitle = {IEEE Robotics and Automation Letters (RAL)},
year = {2022},
}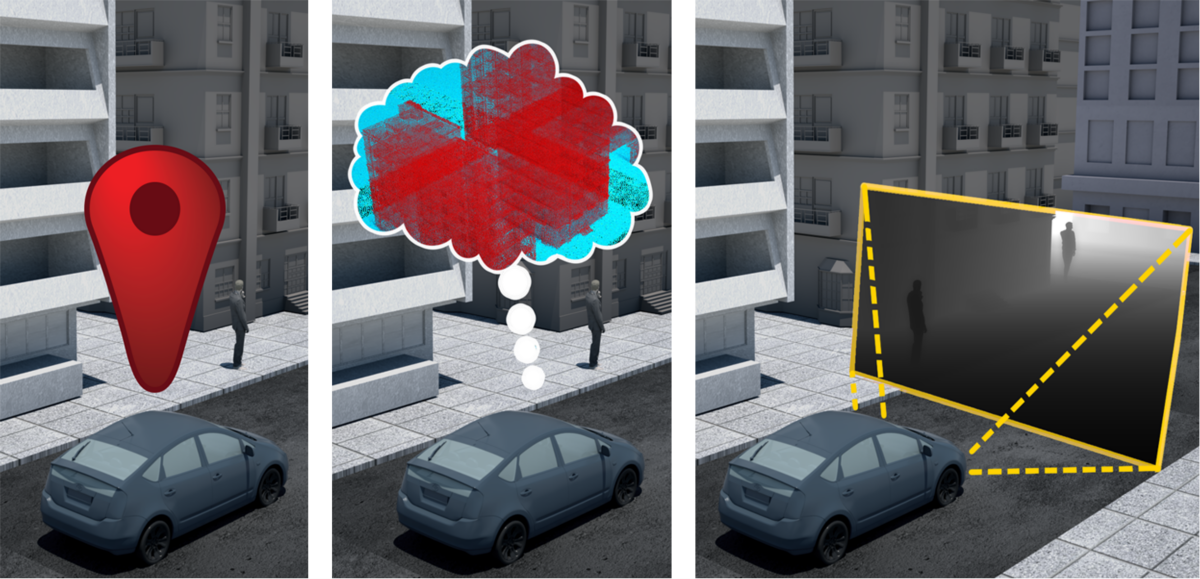
Vaishakh Patil, Alexander Liniger, Dengxin Dai, Luc Van Gool
IEEE Robotics and Automation Letters (RAL), 2022
Project Page / Paper /
@InProceedings{patil2022improving,
author = {Vaishakh Patil and Alexander Liniger and Dengxin Dai and Luc Van Gool},
title = {Improving Depth Estimation Using Map-Based Depth Priors},
booktitle = {IEEE Robotics and Automation Letters (RAL)},
year = {2022},
}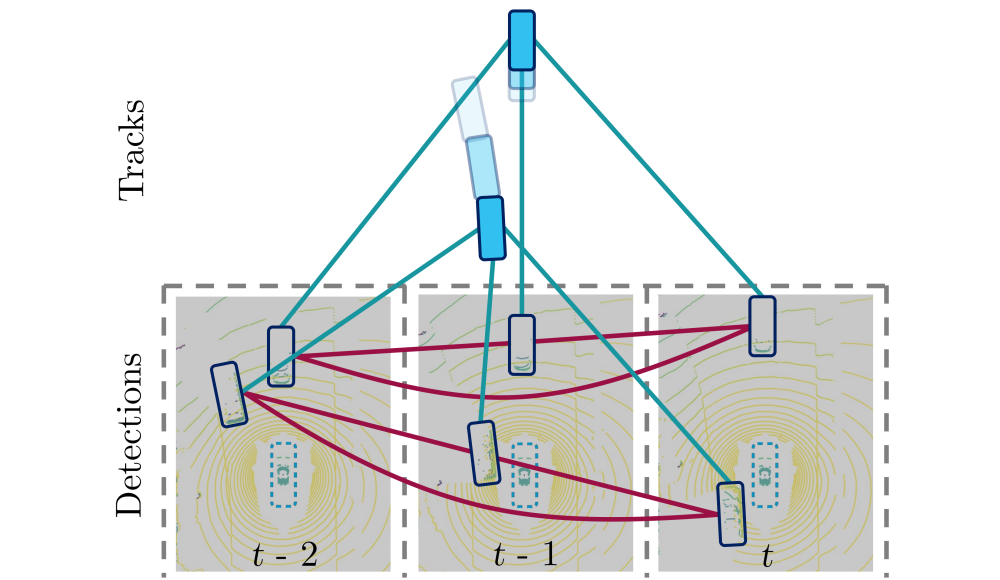
Jan-Nico Zaech, Alexander Liniger, Dengxin Dai, Martin Danelljan, Luc Van Gool
IEEE Robotics and Automation Letters (RAL), 2022
Project Page / Paper /
@InProceedings{zaech2022learnable,
author = {Jan-Nico Zaech and Alexander Liniger and Dengxin Dai and Martin Danelljan and Luc Van Gool},
title = {Learnable Online Graph Representations for 3D Multi-Object Tracking},
booktitle = {IEEE Robotics and Automation Letters (RAL)},
year = {2022},
}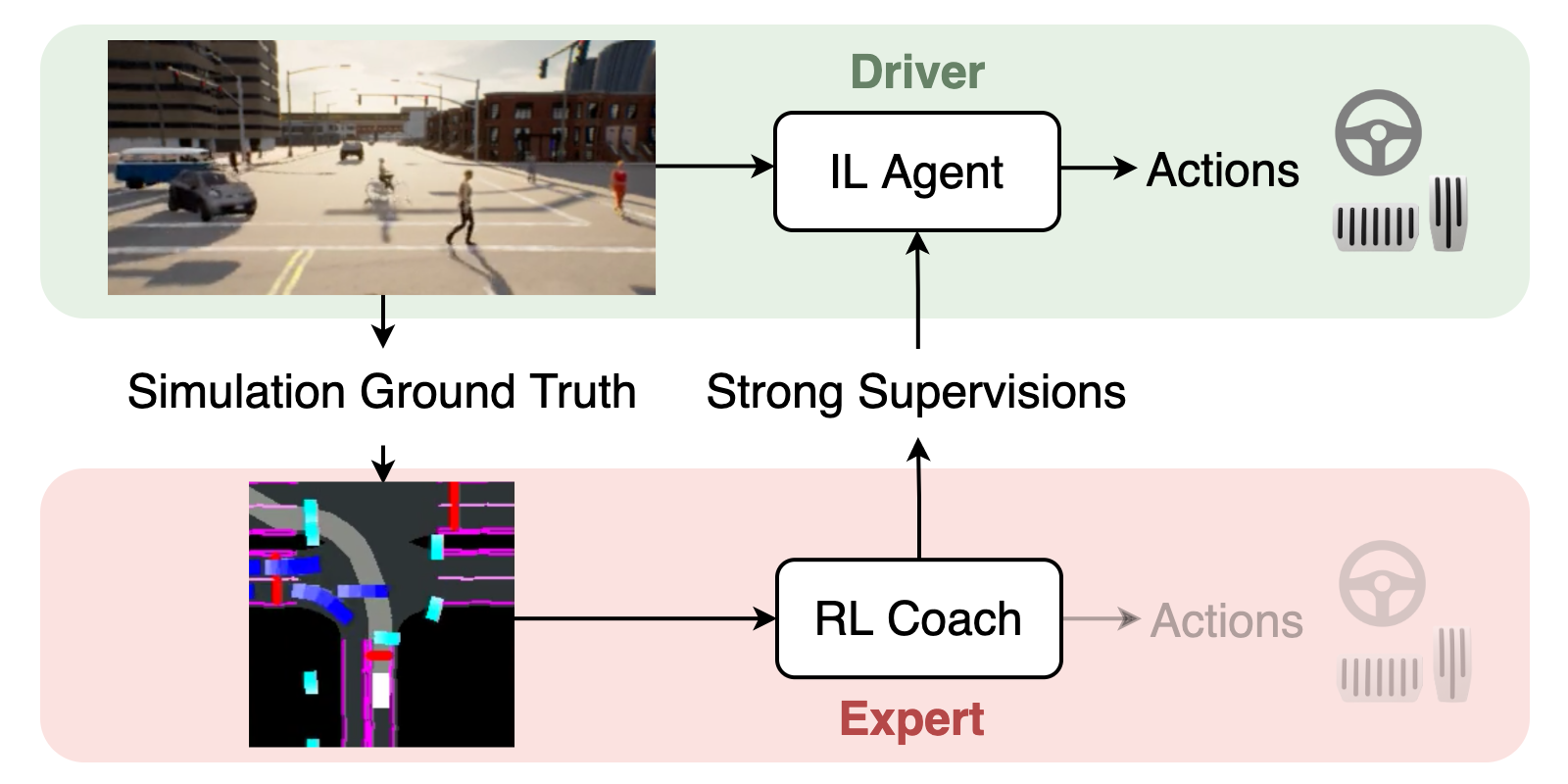
Zhejun Zhang, Alexander Liniger, Dengxin Dai, Fisher Yu, Luc Van Gool
Proc. of the IEEE International Conf. on Computer Vision (ICCV), 2021
Project Page / Paper / Video / Code /
@InProceedings{zhang2021end,
author = {Zhejun Zhang and Alexander Liniger and Dengxin Dai and Fisher Yu and Luc Van Gool},
title = {End-to-End Urban Driving by Imitating a Reinforcement Learning Coach},
booktitle = {Proc. of the IEEE International Conf. on Computer Vision (ICCV)},
year = {2021},
}
Yigit Can, Alexander Liniger, Danda Paudel, Luc Van Gool
Proc. of the IEEE International Conf. on Computer Vision (ICCV), 2021
Project Page / Paper / Code /
@InProceedings{can2021structured,
author = {Yigit Can and Alexander Liniger and Danda Paudel and Luc Van Gool},
title = {Structured Bird's-Eye-View Traffic Scene Understanding From Onboard Images},
booktitle = {Proc. of the IEEE International Conf. on Computer Vision (ICCV)},
year = {2021},
}
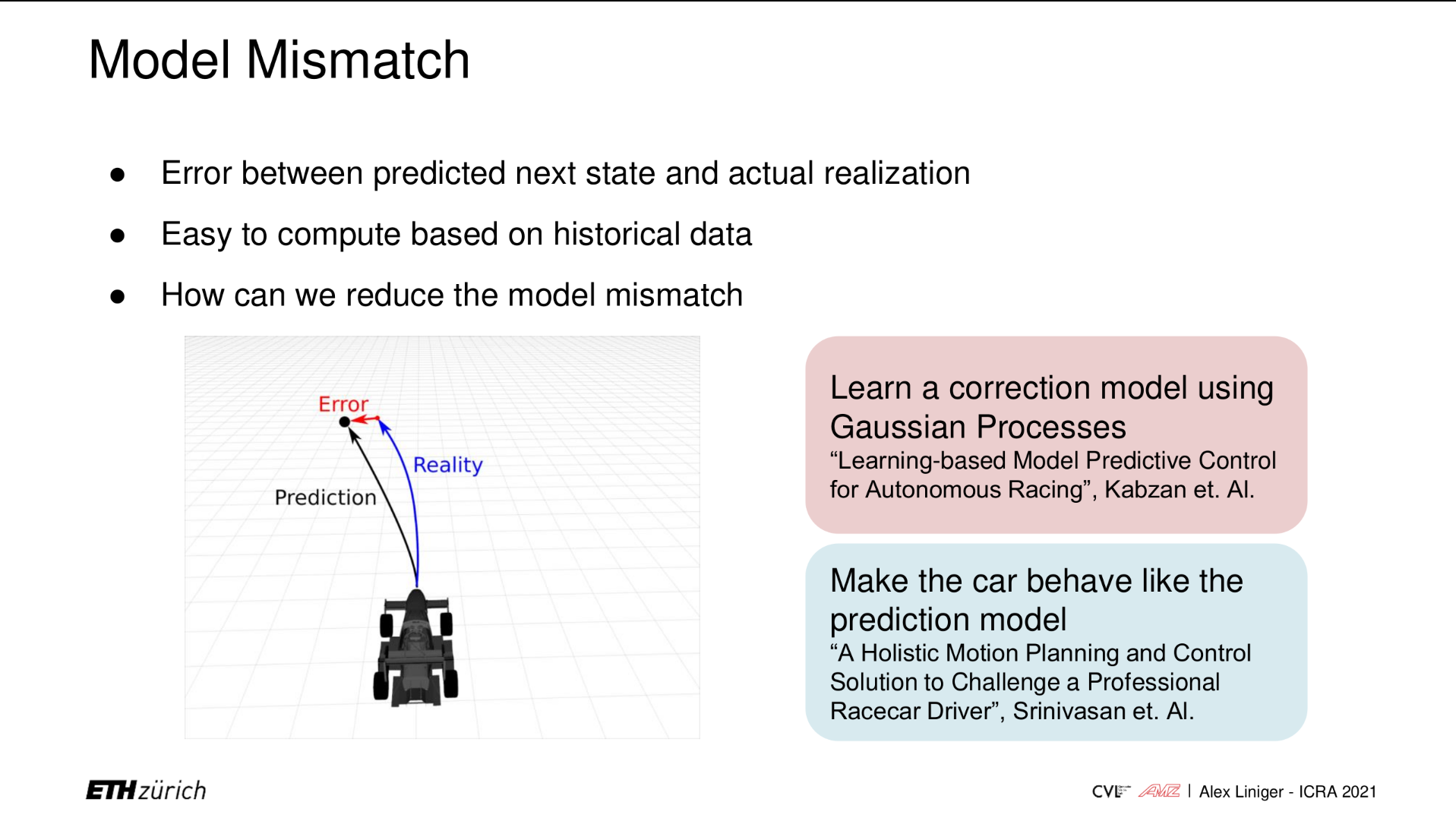
Sirish Srinivasan, Sebastian Giles, Alexander Liniger
IEEE Robotics and Automation Letters (RAL), 2021
Project Page / Paper / Video /
@InProceedings{srinivasan2021holistic,
author = {Sirish Srinivasan and Sebastian Giles and Alexander Liniger},
title = {A Holistic Motion Planning and Control Solution to Challenge a Professional Racecar Driver},
booktitle = {IEEE Robotics and Automation Letters (RAL)},
year = {2021},
}
Edoardo Rella, Jan-Nico Zaech, Alexander Liniger, Luc Van Gool
International Conference on Intelligent Robots and Systems (IROS), 2021
Project Page / Paper /
@InProceedings{rella2021decoder,
author = {Edoardo Rella and Jan-Nico Zaech and Alexander Liniger and Luc Van Gool},
title = {Decoder Fusion RNN: Context and Interaction Aware Decoders for Trajectory Prediction},
booktitle = {International Conference on Intelligent Robots and Systems (IROS)},
year = {2021},
}
Anton Obukhov, Maxim Rakhuba, Alexander Liniger, Zhiwu Huang, Stamatios Georgoulis, Dengxin Dai, Luc Van Gool
International Conference on Artificial Intelligence and Statistics (AISTATS), 2021
Project Page / Paper / Code /
@InProceedings{obukhov2021spectral,
author = {Anton Obukhov and Maxim Rakhuba and Alexander Liniger and Zhiwu Huang and Stamatios Georgoulis and Dengxin Dai and Luc Van Gool},
title = {Spectral Tensor Train Parameterization of Deep Learning Layers},
booktitle = {International Conference on Artificial Intelligence and Statistics (AISTATS)},
year = {2021},
}
Eugenio Chisari, Alexander Liniger, Alisa Rupenyan, Luc Van Gool, John Lygeros
International Conference on Robotics and Automation (ICRA), 2021
Project Page / Paper /
@InProceedings{chisari2021learning,
author = {Eugenio Chisari and Alexander Liniger and Alisa Rupenyan and Luc Van Gool and John Lygeros},
title = {Learning from Simulation, Racing in Reality},
booktitle = {International Conference on Robotics and Automation (ICRA)},
year = {2021},
}
Manish Prajapat, Kamyar Azizzadenesheli, Alexander Liniger, Yisong Yue, Anima Anandkumar
Uncertainty in Artificial Intelligence (UAI), 2021
Project Page / Paper / Supplemental / Code /
@InProceedings{prajapat2021competitive,
author = {Manish Prajapat and Kamyar Azizzadenesheli and Alexander Liniger and Yisong Yue and Anima Anandkumar},
title = {Competitive Policy Optimization},
booktitle = {Uncertainty in Artificial Intelligence (UAI)},
year = {2021},
}
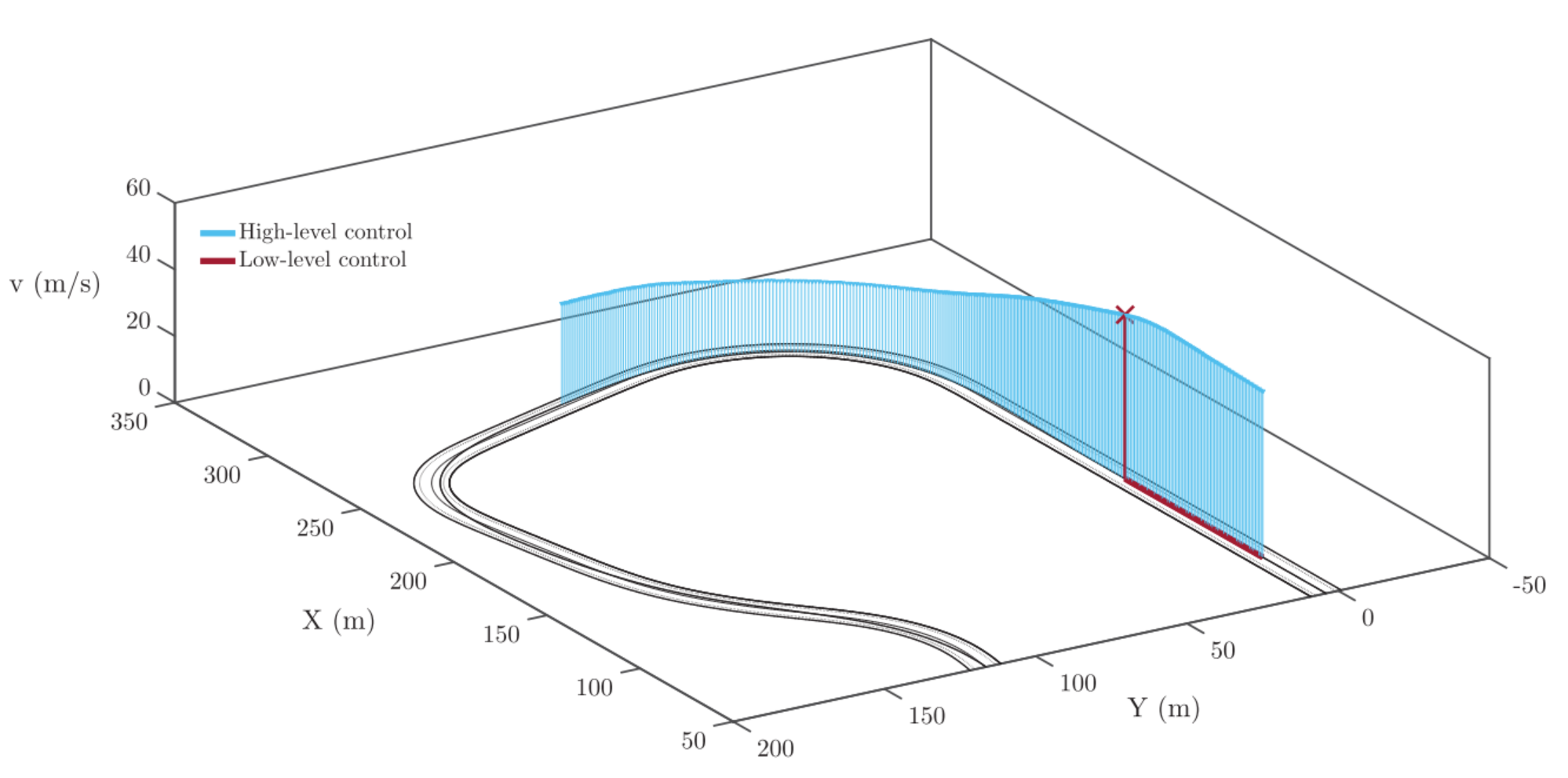
Jose Vazquez, Marius Brühlmeier, Alexander Liniger, Alisa Rupenyan, John Lygeros
International Conference on Intelligent Robots and Systems (IROS), 2020
Project Page / Paper / Video /
@InProceedings{vazquez2020optimization,
author = {Jose Vazquez and Marius Brühlmeier and Alexander Liniger and Alisa Rupenyan and John Lygeros},
title = {Optimization-Based Hierarchical Motion Planning for Autonomous Racing},
booktitle = {International Conference on Intelligent Robots and Systems (IROS)},
year = {2020},
}
Jan-Nico Zaech, Dengxin Dai, Alexander Liniger, Luc Van Gool
International Conference on Intelligent Robots and Systems (IROS), 2020
Project Page / Paper /
@InProceedings{zaech2020action,
author = {Jan-Nico Zaech and Dengxin Dai and Alexander Liniger and Luc Van Gool},
title = {Action Sequence Predictions of Vehicles in Urban Environments using Map and Social Context},
booktitle = {International Conference on Intelligent Robots and Systems (IROS)},
year = {2020},
}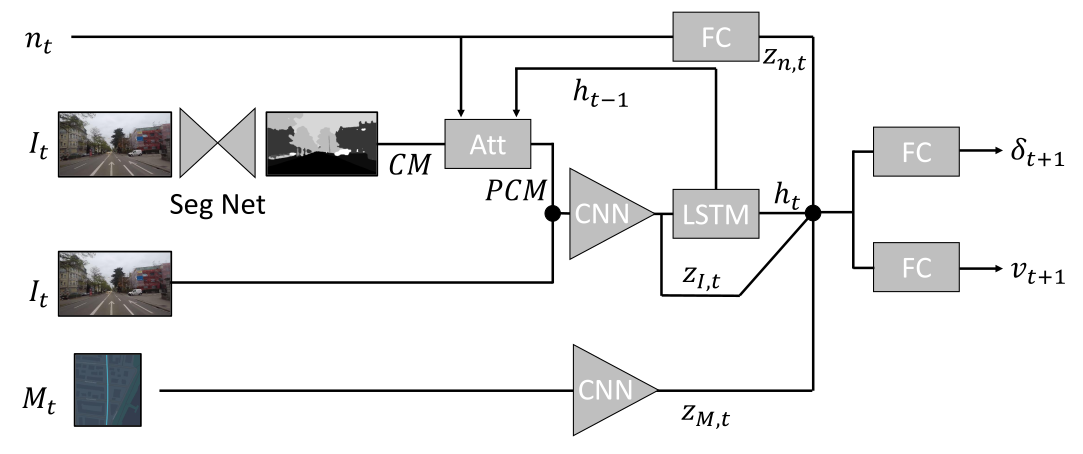
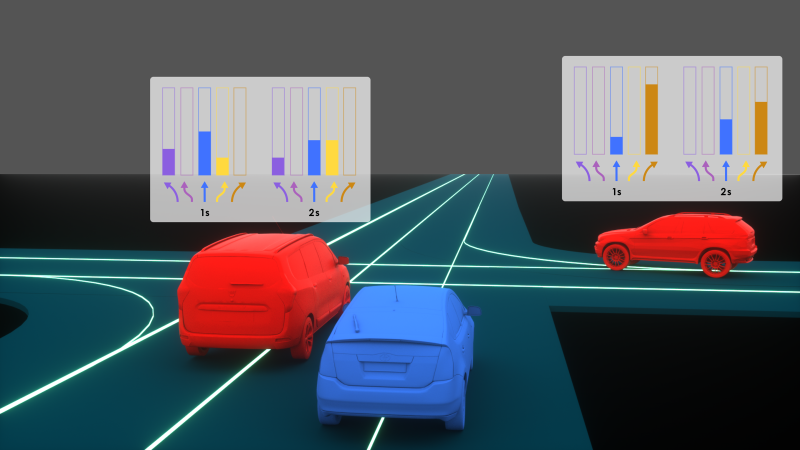
Simon Hecker, Dengxin Dai, Alexander Liniger, Martin Hahner, Luc Van Gool
International Conference on Intelligent Robots and Systems (IROS), 2020
Project Page / Paper /
@InProceedings{hecker2020learning,
author = {Simon Hecker and Dengxin Dai and Alexander Liniger and Martin Hahner and Luc Van Gool},
title = {Learning Accurate and Human-Like Driving using Semantic Maps and Attention},
booktitle = {International Conference on Intelligent Robots and Systems (IROS)},
year = {2020},
}
Juraj Kabzan, Miguel Valls, Victor Reijgwart, Hubertus Hendrikx, Claas Ehmke, Manish Prajapat, Andreas Bühler, Nikhil Gosala, Mehak Gupta, Ramya Sivanesan, Ankit Dhall, Eugenio Chisari, Napat Karnchanachari, Sonja Brits, Manuel Dangel, Inkyu Sa, Renaud Dubé, Abel Gawel, Mark Pfeiffer, Alexander Liniger, John Lygeros, Roland Siegwart
Journal of Field Robotics (JFR), 2020
Project Page / Paper /
@InProceedings{kabzan2020amz,
author = {Juraj Kabzan and Miguel Valls and Victor Reijgwart and Hubertus Hendrikx and Claas Ehmke and Manish Prajapat and Andreas Bühler and Nikhil Gosala and Mehak Gupta and Ramya Sivanesan and Ankit Dhall and Eugenio Chisari and Napat Karnchanachari and Sonja Brits and Manuel Dangel and Inkyu Sa and Renaud Dubé and Abel Gawel and Mark Pfeiffer and Alexander Liniger and John Lygeros and Roland Siegwart},
title = {AMZ Driverless: The Full Autonomous Racing System},
booktitle = {Journal of Field Robotics (JFR)},
year = {2020},
}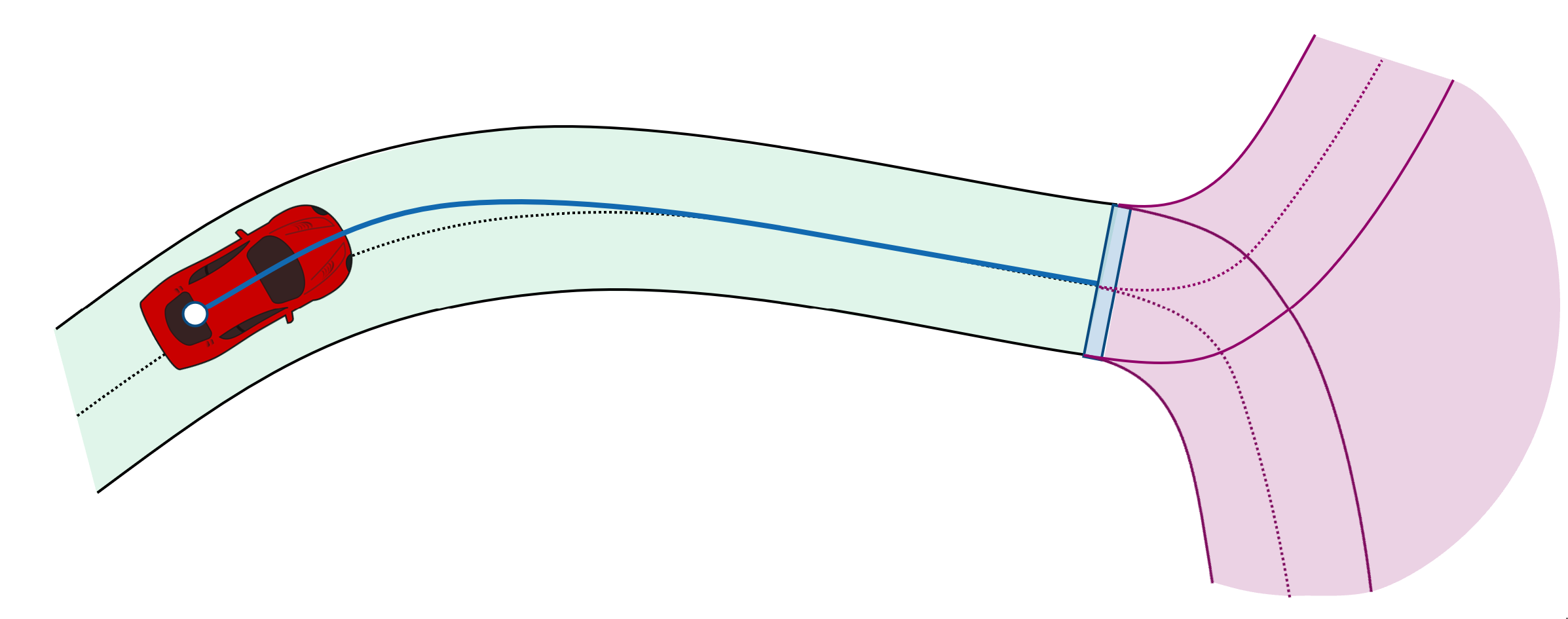
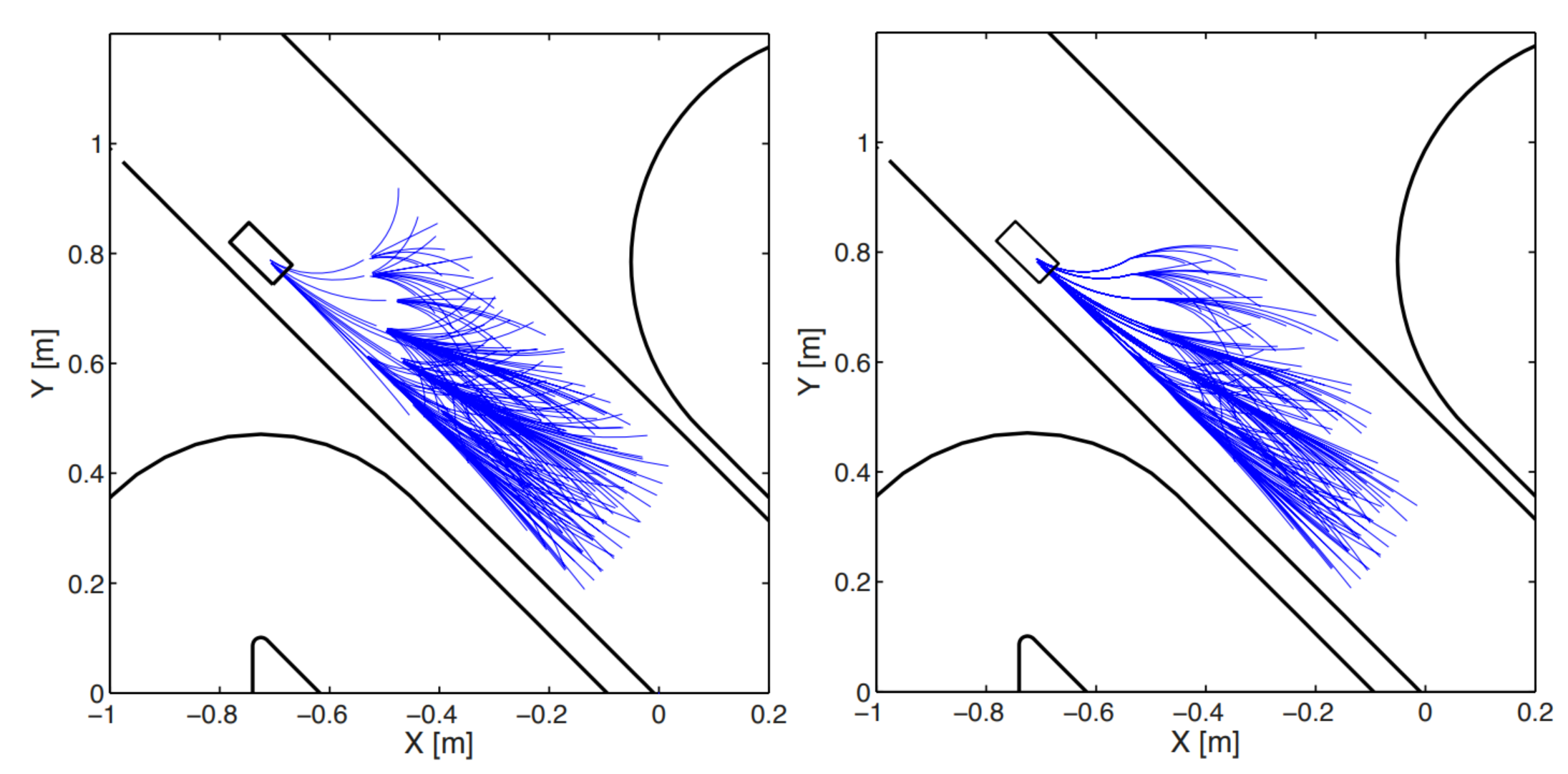
Alexander Liniger, Luc Van Gool
Robotics: Science and Systems (RSS), 2020
Project Page / Paper / Video / Code /
@InProceedings{liniger2020safe,
author = {Alexander Liniger and Luc Van Gool},
title = {Safe Motion Planning for Autonomous Driving using an Adversarial Road Model},
booktitle = {Robotics: Science and Systems (RSS)},
year = {2020},
}
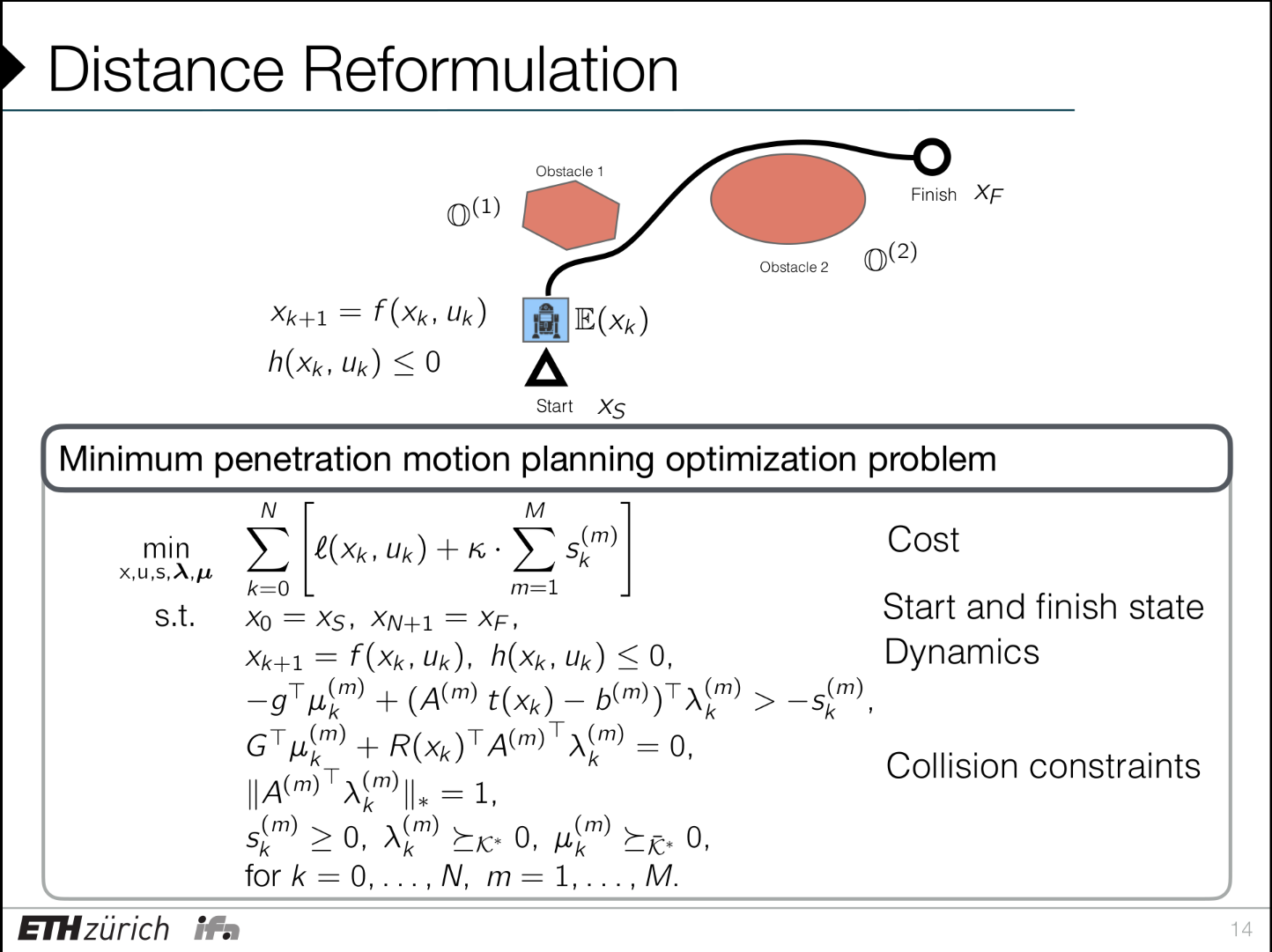
Xiaojing Zhang, Alexander Liniger, Francesco Borrelli
IEEE Transactions on Control Systems Technology, 2020
Project Page / Paper / Code /
@InProceedings{zhang2020optimization,
author = {Xiaojing Zhang and Alexander Liniger and Francesco Borrelli},
title = {Optimization-Based Collision Avoidance},
booktitle = {IEEE Transactions on Control Systems Technology},
year = {2020},
}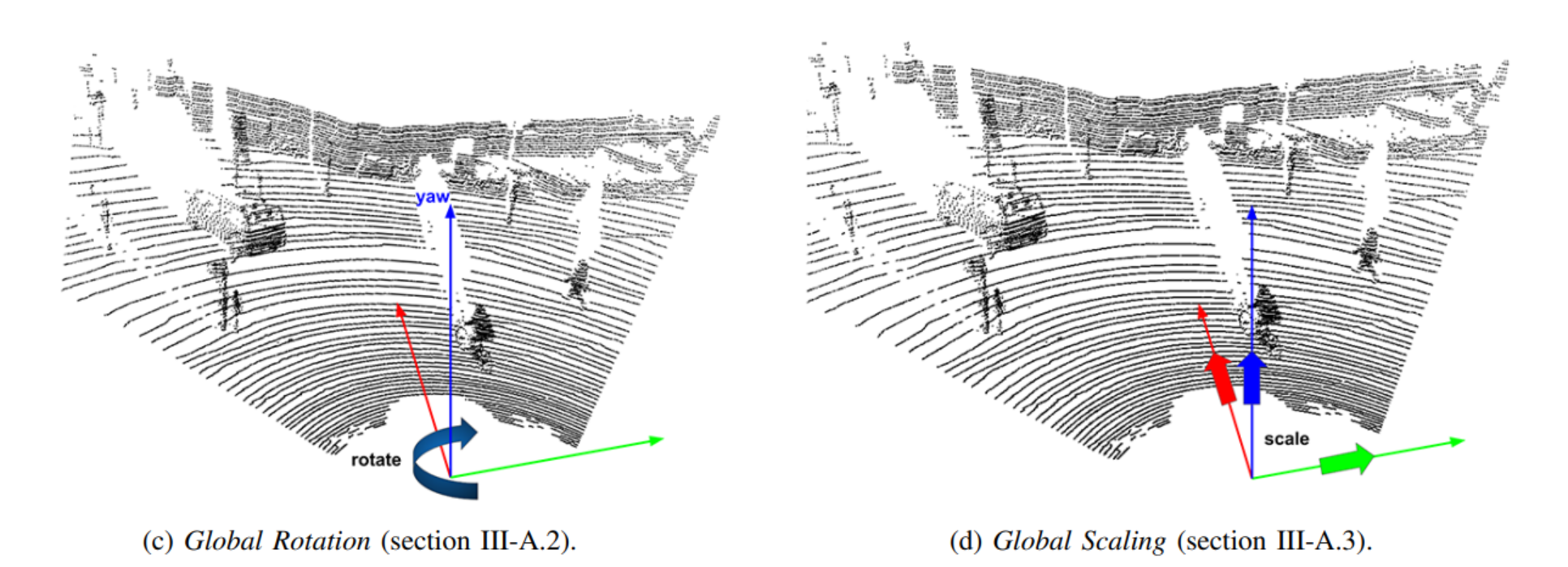
Martin Hahner, Dengxin Dai, Alexander Liniger, Luc Van Gool
arXiv.org, 2020
Project Page / Paper /
@InProceedings{hahner2020quantifying,
author = {Martin Hahner and Dengxin Dai and Alexander Liniger and Luc Van Gool},
title = {Quantifying Data Augmentation for LiDAR based 3D Object Detection},
booktitle = {arXiv.org},
year = {2020},
}
Samuel Balula, Alexander Liniger, Alisa Rupenyan, John Lygeros
European Control Conference (ECC), 2020
Project Page / Paper /
@InProceedings{balula2020reference,
author = {Samuel Balula and Alexander Liniger and Alisa Rupenyan and John Lygeros},
title = {Reference design for closed loop system optimization},
booktitle = {European Control Conference (ECC)},
year = {2020},
}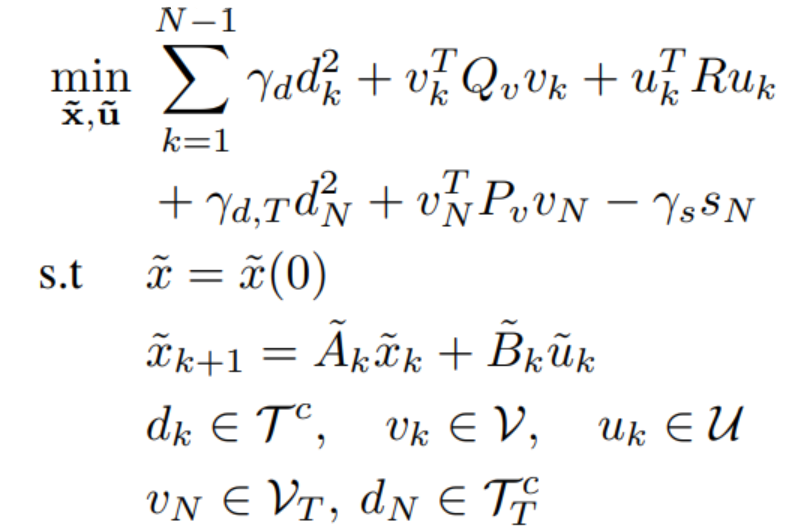
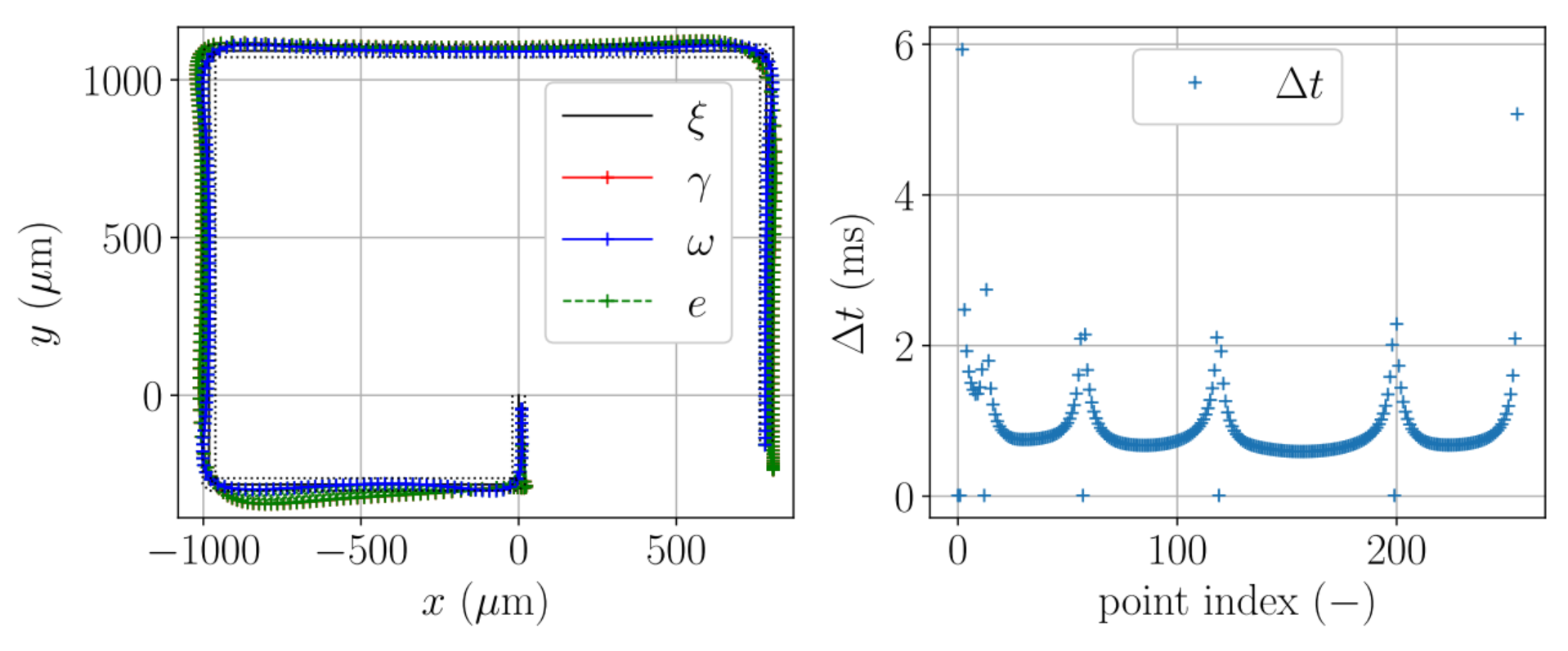
Alexander Liniger, Luca Varano, Alisa Rupenyan, John Lygeros
Conference on Decision and Control (CDC), 2019
Project Page / Paper /
@InProceedings{liniger2019real,
author = {Alexander Liniger and Luca Varano and Alisa Rupenyan and John Lygeros},
title = {Real-Time Predictive Control for Precision Machining},
booktitle = {Conference on Decision and Control (CDC)},
year = {2019},
}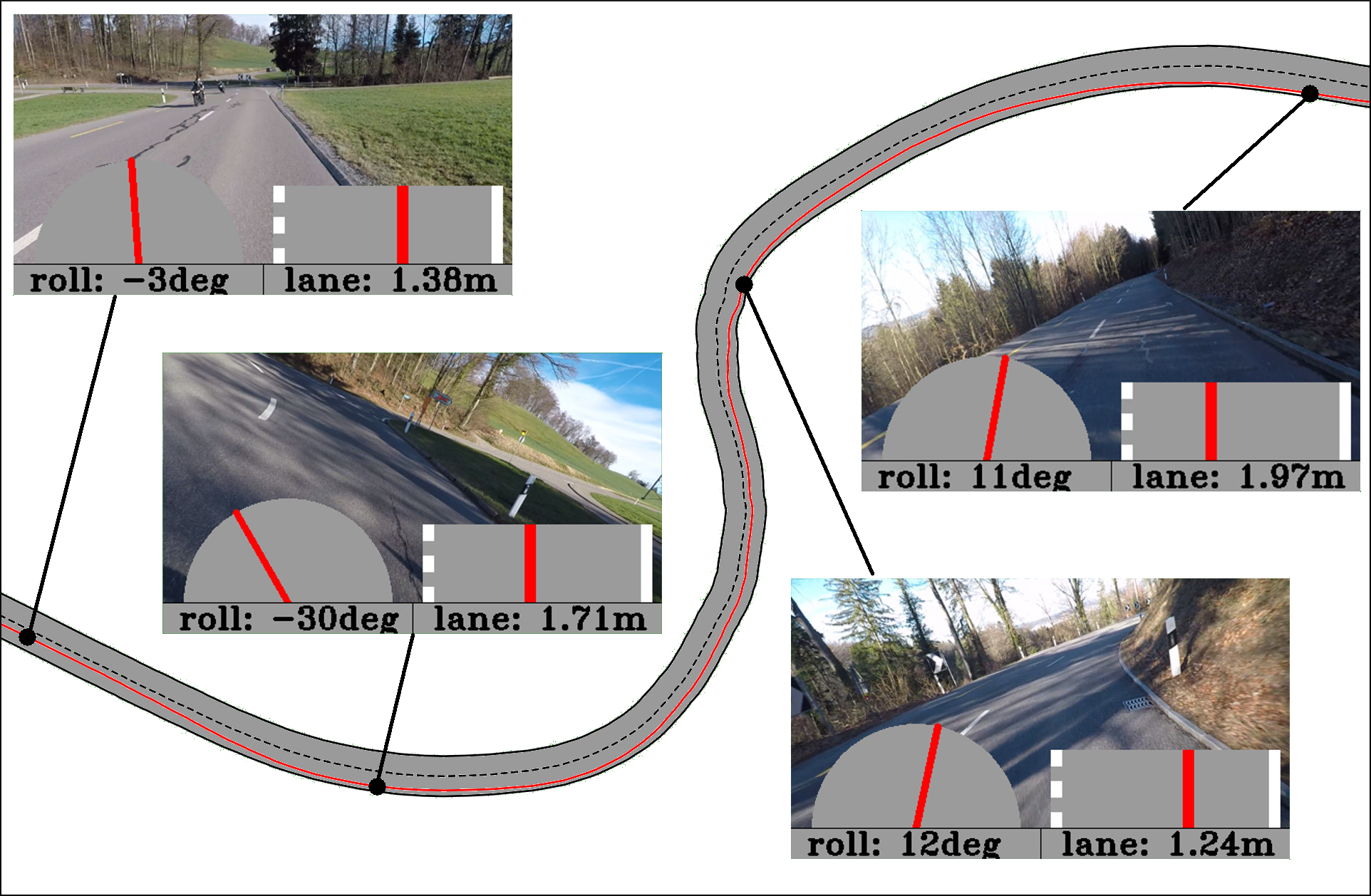
Simon Hecker, Alexander Liniger, Henrik Maurenbrecher, Dengxin Dai, Luc Van Gool
International Conference on Intelligent Transportation Systems (ITSC), 2019
Project Page / Paper /
@InProceedings{hecker2019learning,
author = {Simon Hecker and Alexander Liniger and Henrik Maurenbrecher and Dengxin Dai and Luc Van Gool},
title = {Learning a Curve Guardian for Motorcycles},
booktitle = {International Conference on Intelligent Transportation Systems (ITSC)},
year = {2019},
}
Juraj Kabzan, Lukas Hewing, Alexander Liniger, Melanie Zeilinger
IEEE Robotics and Automation Letters (RAL), 2019
Project Page / Paper /
@InProceedings{kabzan2019learning,
author = {Juraj Kabzan and Lukas Hewing and Alexander Liniger and Melanie Zeilinger},
title = {Learning-based Model Predictive Control for Autonomous Racing},
booktitle = {IEEE Robotics and Automation Letters (RAL)},
year = {2019},
}
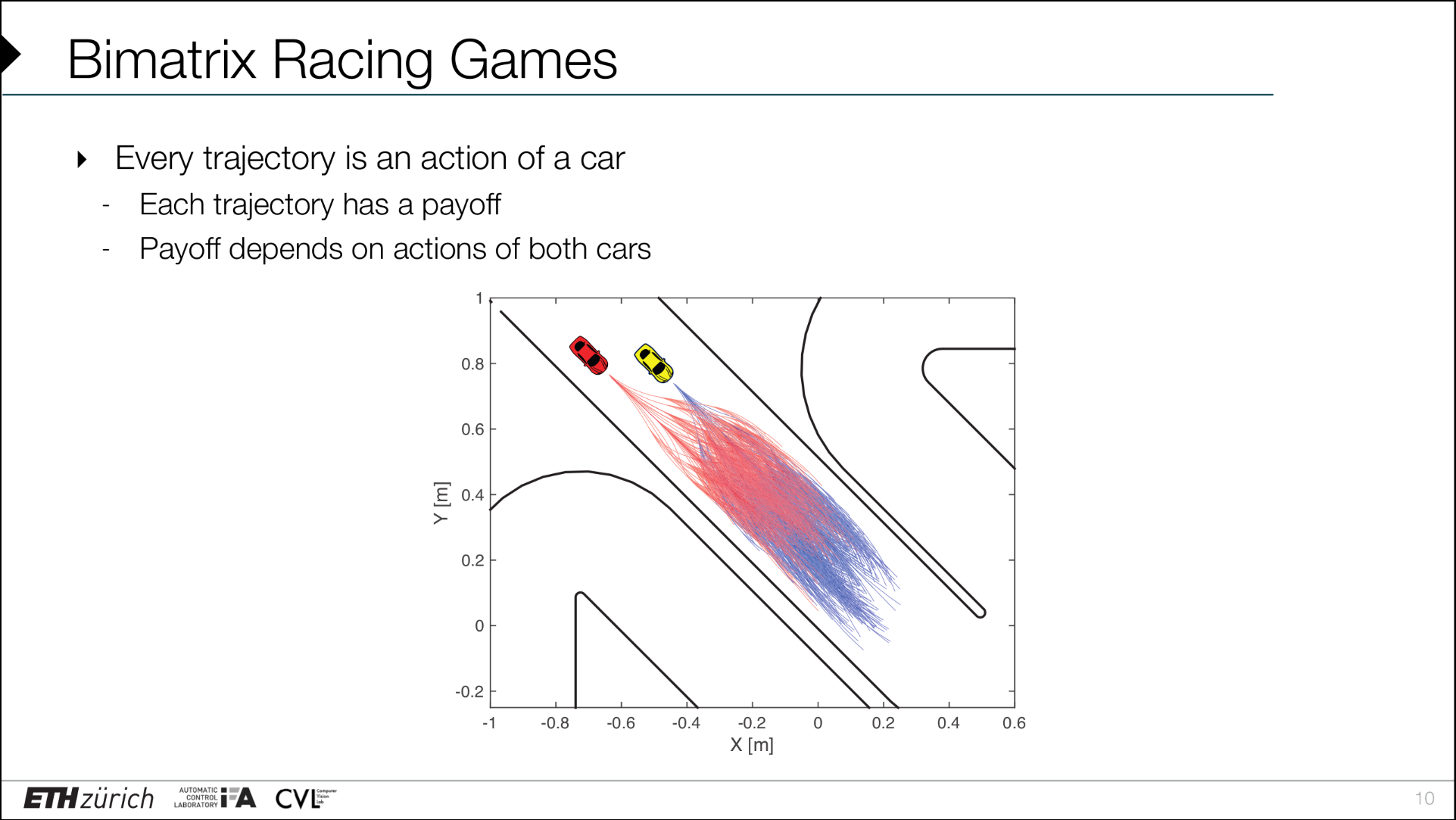
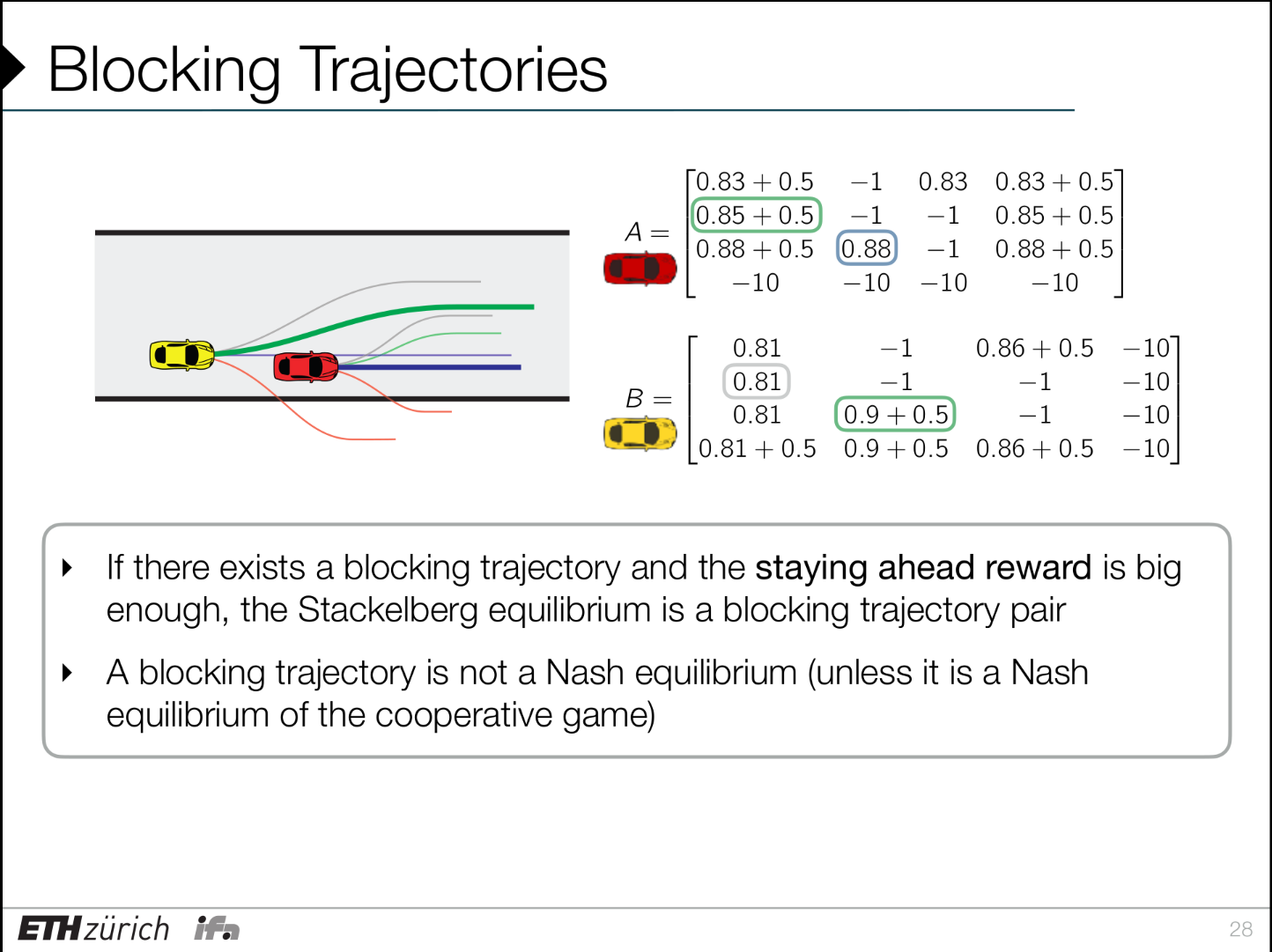
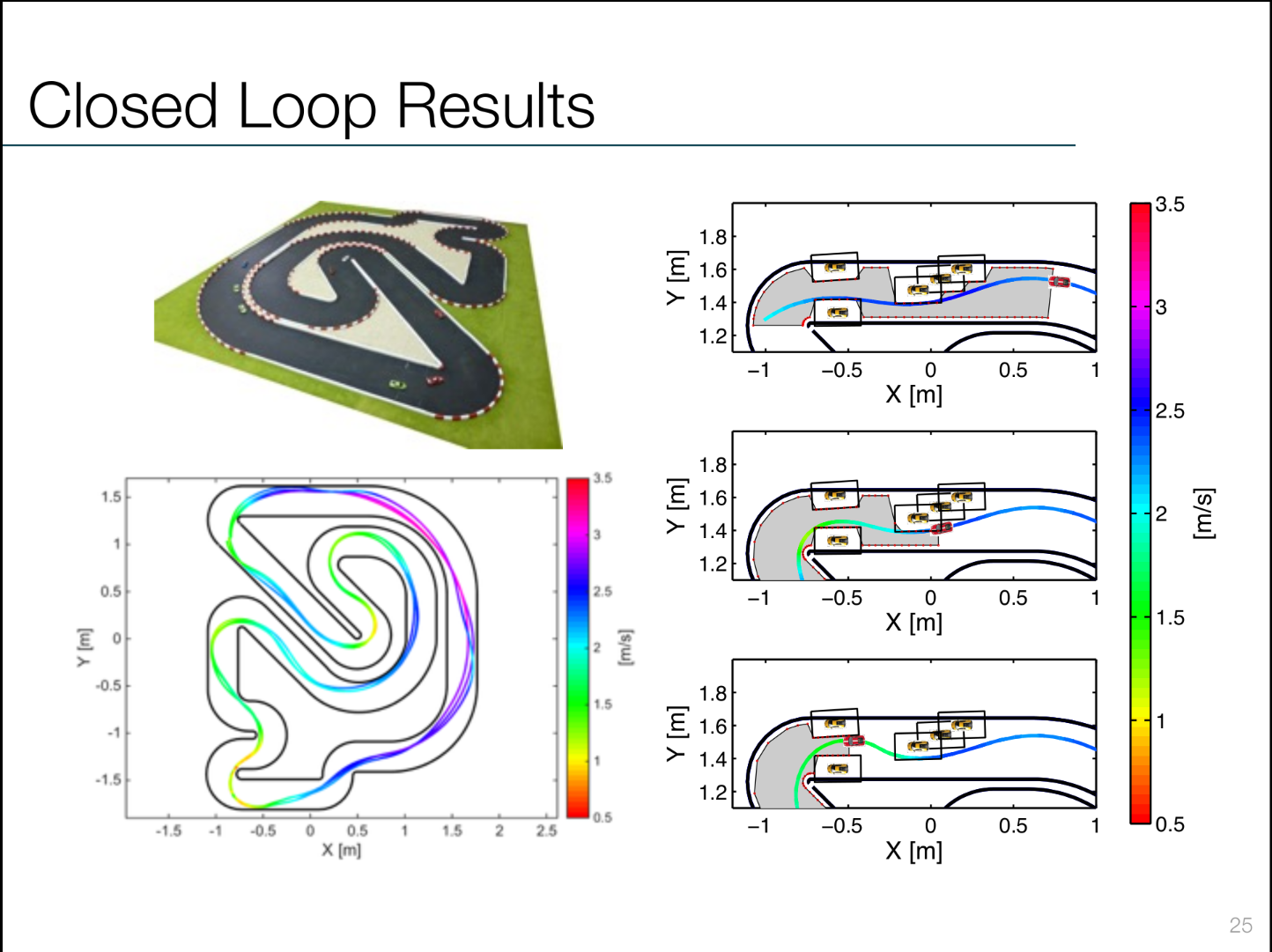
Alexander Liniger, John Lygeros
IEEE Transactions on Control Systems Technology, 2019
Project Page / Paper / Video /
@InProceedings{liniger2019noncooperative,
author = {Alexander Liniger and John Lygeros},
title = {A Noncooperative Game Approach to Autonomous Racing},
booktitle = {IEEE Transactions on Control Systems Technology},
year = {2019},
}
Tommaso Novi, Alexander Liniger, Renzo Capitani, Claudio Annicchiarico
Vehicle system dynamics, 2019
Project Page / Paper /
@InProceedings{novi2019real,
author = {Tommaso Novi and Alexander Liniger and Renzo Capitani and Claudio Annicchiarico},
title = {Real-time control for at-limit handling driving on a predefined path},
booktitle = {Vehicle system dynamics},
year = {2019},
}
Alexander Liniger
Doctoral Thesis ETH Zurich, 2018
Project Page / Paper / Video /
@InProceedings{liniger2018path,
author = {Alexander Liniger},
title = {Path Planning and Control for Autonomous Racing},
booktitle = {Doctoral Thesis ETH Zurich},
year = {2018},
}
Tommaso Novi, Alexander Liniger, Renzo Capitani, Marco Fainello, Giacomo Danisi, Claudio Annicchiarico
SAE International Journal of Vehicle Dynamics, Stability, and NVH, 2018
Project Page / Paper /
@InProceedings{novi2018influence,
author = {Tommaso Novi and Alexander Liniger and Renzo Capitani and Marco Fainello and Giacomo Danisi and Claudio Annicchiarico},
title = {The influence of autonomous driving on passive vehicle dynamics},
booktitle = {SAE International Journal of Vehicle Dynamics, Stability, and NVH},
year = {2018},
}
Lukas Hewing, Alexander Liniger, Melanie Zeilinger
European Control Conference (ECC), 2018
Project Page / Paper /
@InProceedings{hewing2018cautious,
author = {Lukas Hewing and Alexander Liniger and Melanie Zeilinger},
title = {Cautious NMPC with Gaussian Process Dynamics for Autonomous Miniature Race Cars},
booktitle = {European Control Conference (ECC)},
year = {2018},
}
Xiaojing Zhang, Alexander Liniger, Atsushi Sakai, Francesco Borrelli
Conference on Decision and Control (CDC), 2018
Project Page / Paper / Code /
@InProceedings{zhang2018autonomous,
author = {Xiaojing Zhang and Alexander Liniger and Atsushi Sakai and Francesco Borrelli},
title = {Autonomous Parking Using Optimization-Based Collision Avoidance},
booktitle = {Conference on Decision and Control (CDC)},
year = {2018},
}
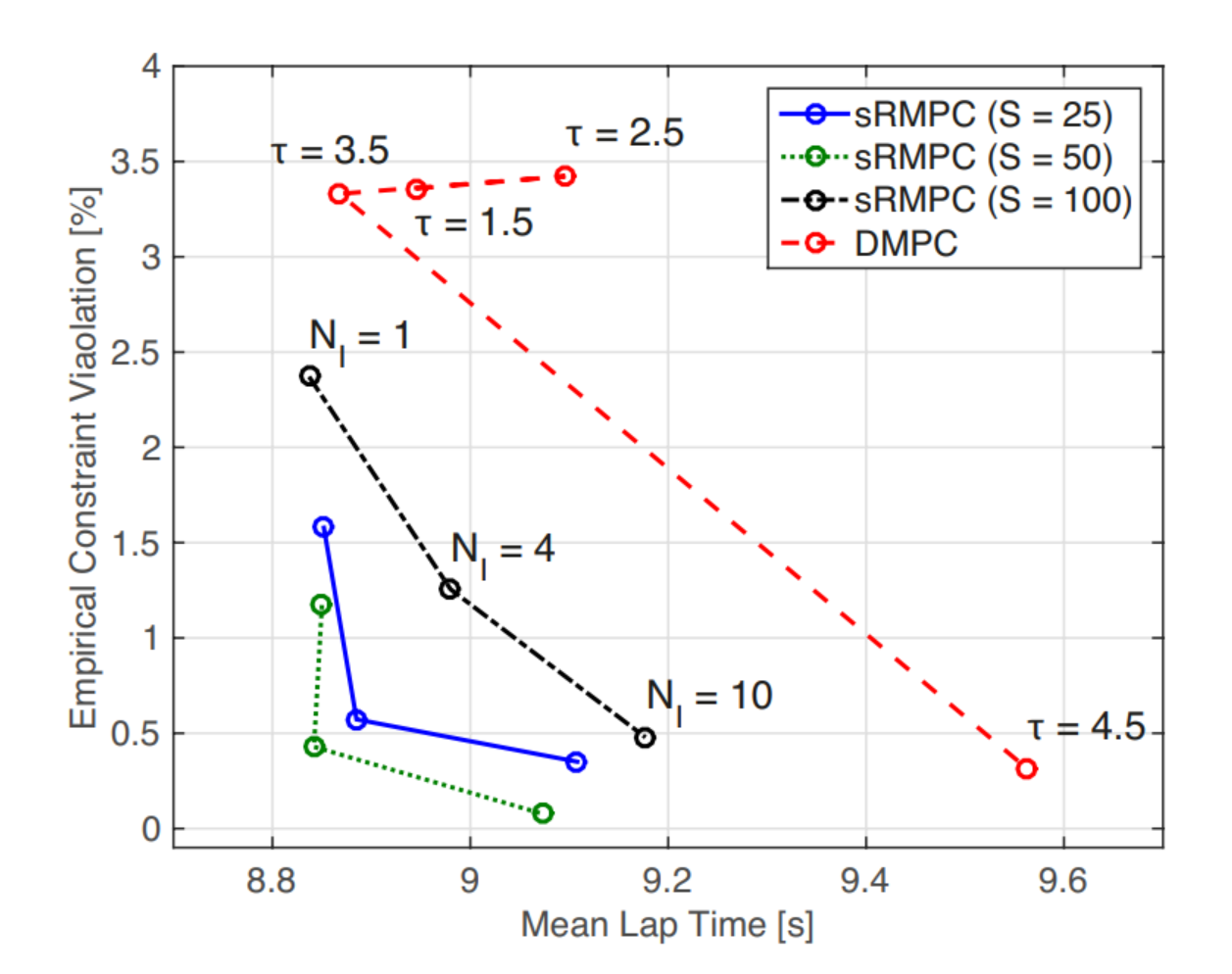
Alexander Liniger, Xiaojing Zhang, Philipp Aeschbach, Angelos Georghiou, John Lygeros
American Control Conference (ACC), 2017
Project Page / Paper /
@InProceedings{liniger2017racing,
author = {Alexander Liniger and Xiaojing Zhang and Philipp Aeschbach and Angelos Georghiou and John Lygeros},
title = {Racing miniature cars: Enhancing performance using Stochastic MPC and disturbance feedback},
booktitle = {American Control Conference (ACC)},
year = {2017},
}
Alexander Liniger, John Lygeros
IEEE Transactions on Control Systems Technology, 2017
Project Page / Paper / Video /
@InProceedings{liniger2017real,
author = {Alexander Liniger and John Lygeros},
title = {Real-time Control for Autonomous Racing Based on Viability Theory},
booktitle = {IEEE Transactions on Control Systems Technology},
year = {2017},
}
Jesus Carrau, Alexander Liniger, Xiaojing Zhang, John Lygeros
European Control Conference (ECC), 2016
Project Page / Paper /
@InProceedings{carrau2016efficient,
author = {Jesus Carrau and Alexander Liniger and Xiaojing Zhang and John Lygeros},
title = {Efficient implementation of Randomized MPC for miniature race cars},
booktitle = {European Control Conference (ECC)},
year = {2016},
}
Jonas Wirz, Marco Tranzatto, Alexander Liniger, Marcello Colombino, Henrik Hesse, Sergio Grammatico
World Robotic Sailing championship and International Robotic Sailing Conference, 2015
Project Page / Paper /
@InProceedings{wirz2015aeolus,
author = {Jonas Wirz and Marco Tranzatto and Alexander Liniger and Marcello Colombino and Henrik Hesse and Sergio Grammatico},
title = {AEOLUS, the ETH Autonomous Model Sailboat},
booktitle = {World Robotic Sailing championship and International Robotic Sailing Conference},
year = {2015},
}
Marco Tranzatto, Alexander Liniger, Sergio Grammatico, Alberto Landi
OCEANS, 2015
Project Page / Paper /
@InProceedings{tranzatto2015debut,
author = {Marco Tranzatto and Alexander Liniger and Sergio Grammatico and Alberto Landi},
title = {The debut of Aeolus, the autonomous model sailboat of ETH Zurich},
booktitle = {OCEANS},
year = {2015},
}
Alexander Liniger, John Lygeros
Hybrid Systems: Computation and Control (HSCC), 2015
Project Page / Paper /
@InProceedings{liniger2015viability,
author = {Alexander Liniger and John Lygeros},
title = {A viability approach for fast recursive feasible finite horizon path planning of autonomous RC cars},
booktitle = {Hybrid Systems: Computation and Control (HSCC)},
year = {2015},
}
Alexander Liniger, Alexander Domahidi, Manfred Morari
Optimal Control Applications and Methods, 2015
Project Page / Paper / Video / Code /
@InProceedings{liniger2015optimization,
author = {Alexander Liniger and Alexander Domahidi and Manfred Morari},
title = {Optimization-Based Autonomous Racing of 1:43 Scale RC Cars},
booktitle = {Optimal Control Applications and Methods},
year = {2015},
}
Alexander Liniger
Master Thesis ETH Zurich, 2012
Project Page / Paper / Video /
@InProceedings{liniger2012autonomous,
author = {Alexander Liniger},
title = {Autonomous Drift Control},
booktitle = {Master Thesis ETH Zurich},
year = {2012},
}Patents
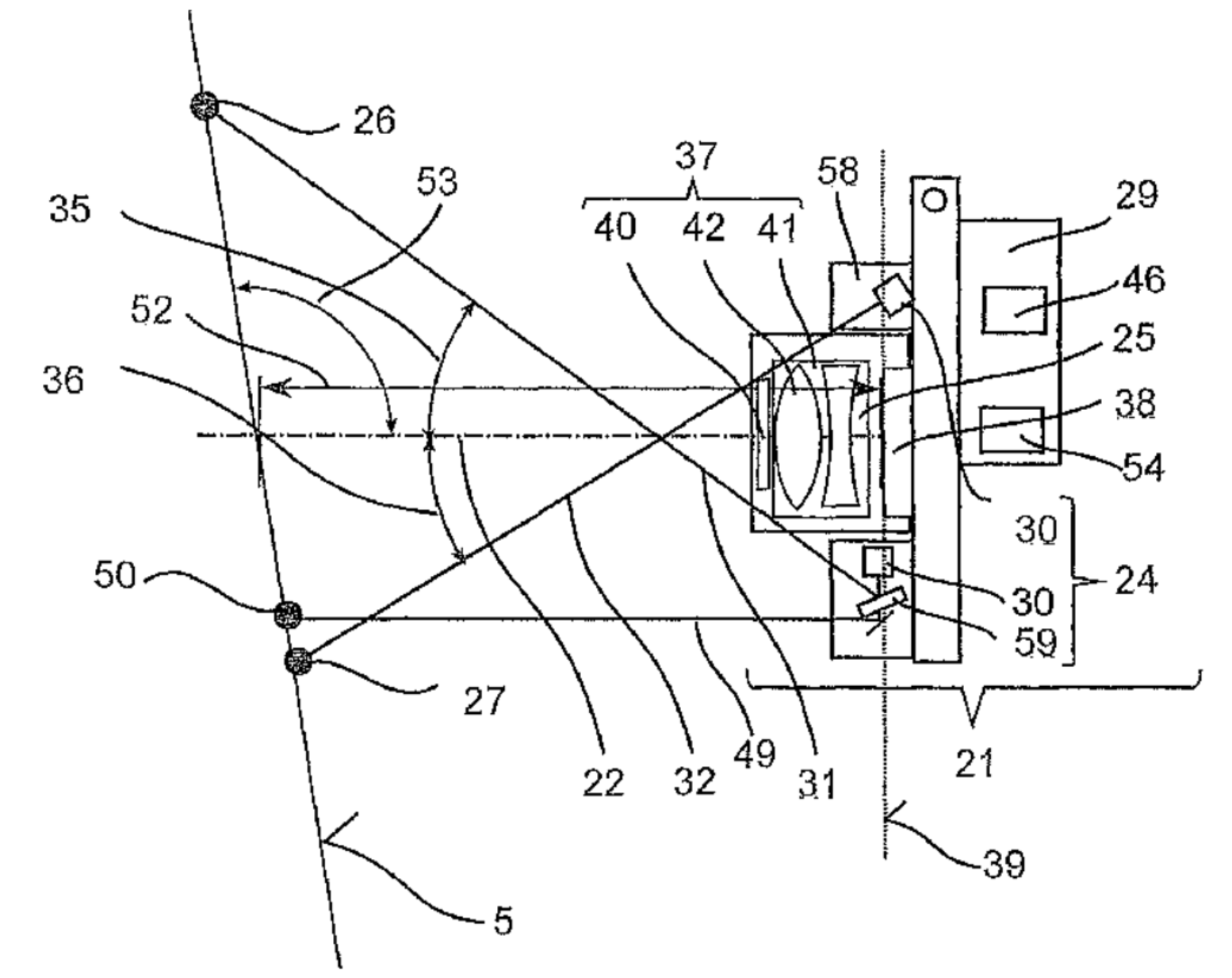
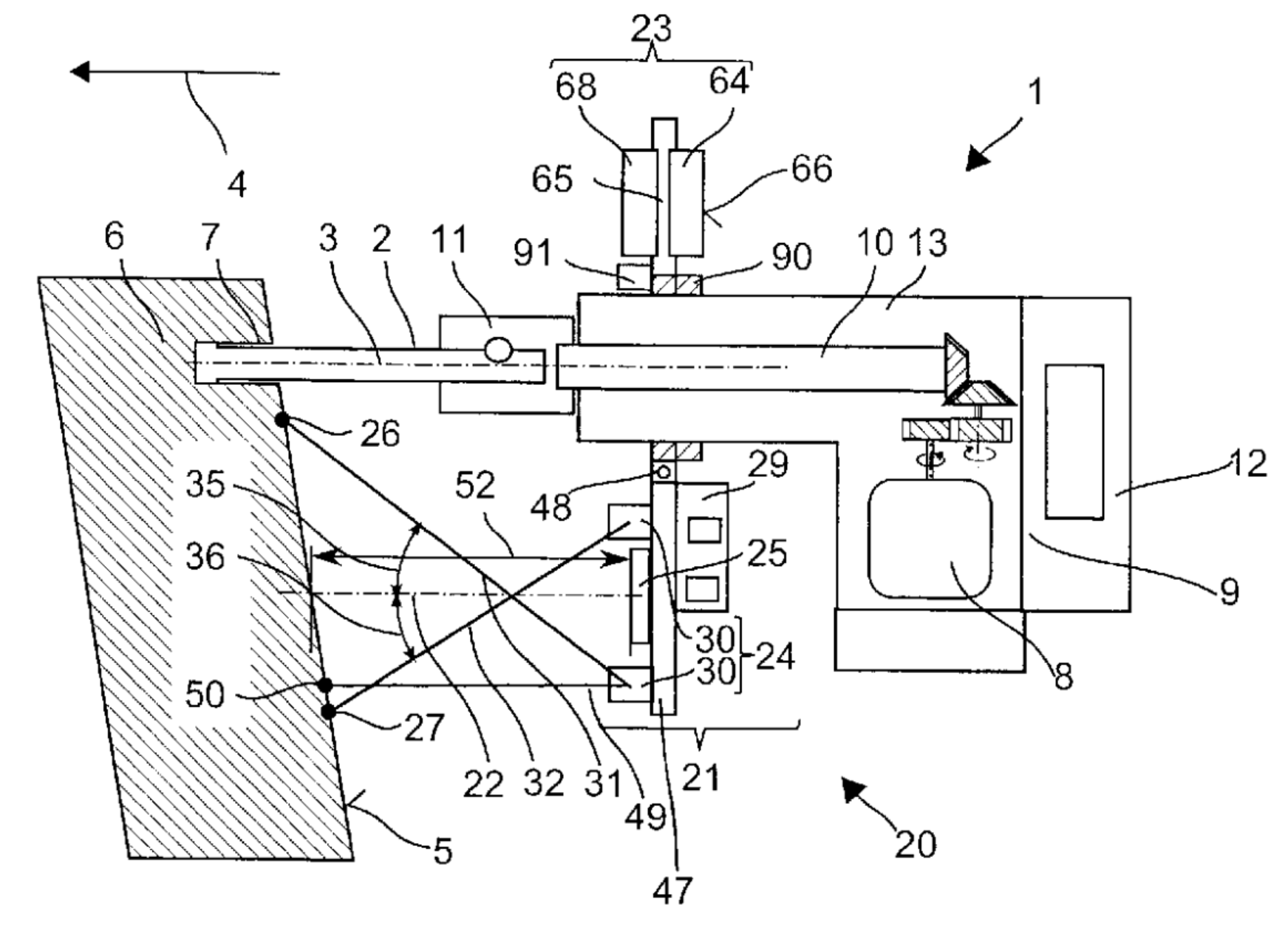
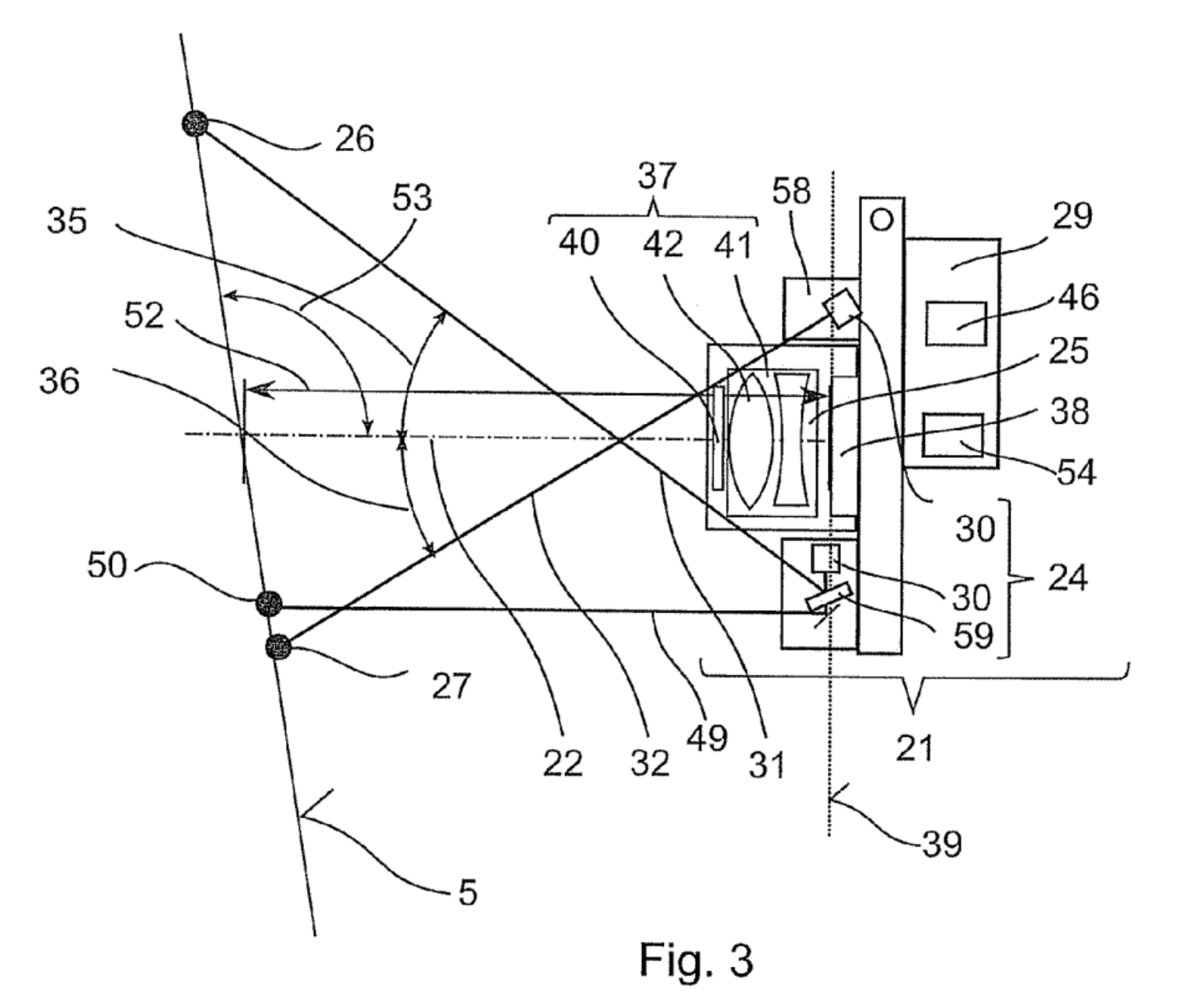
Peer Schmidt, Roland Schaer, Alexander Liniger, David Leuzinger
US Patent 9,289,833, 2016
Project Page / Paper /
@InProceedings{schmidt2016accessory,
author = {Peer Schmidt and Roland Schaer and Alexander Liniger and David Leuzinger},
title = {Accessory of a machine drill and control method},
booktitle = {US Patent 9,289,833},
year = {2016},
}
Peer Schmidt, Roland Schaer, Alexander Liniger, David Leuzinger
US Patent 8,810,802, 2014
Project Page / Paper /
@InProceedings{schmidt2014auxiliary,
author = {Peer Schmidt and Roland Schaer and Alexander Liniger and David Leuzinger},
title = {Auxiliary device of a drilling machine and control method},
booktitle = {US Patent 8,810,802},
year = {2014},
}
Peer Schmidt, Roland Schaer, Alexander Liniger, David Leuzinger
US Patent App. 13/334,771, 2012
Project Page / Paper /
@InProceedings{schmidt2012accessory,
author = {Peer Schmidt and Roland Schaer and Alexander Liniger and David Leuzinger},
title = {Accessory For a Power Drill and Control Method},
booktitle = {US Patent App. 13/334,771},
year = {2012},
}Talks
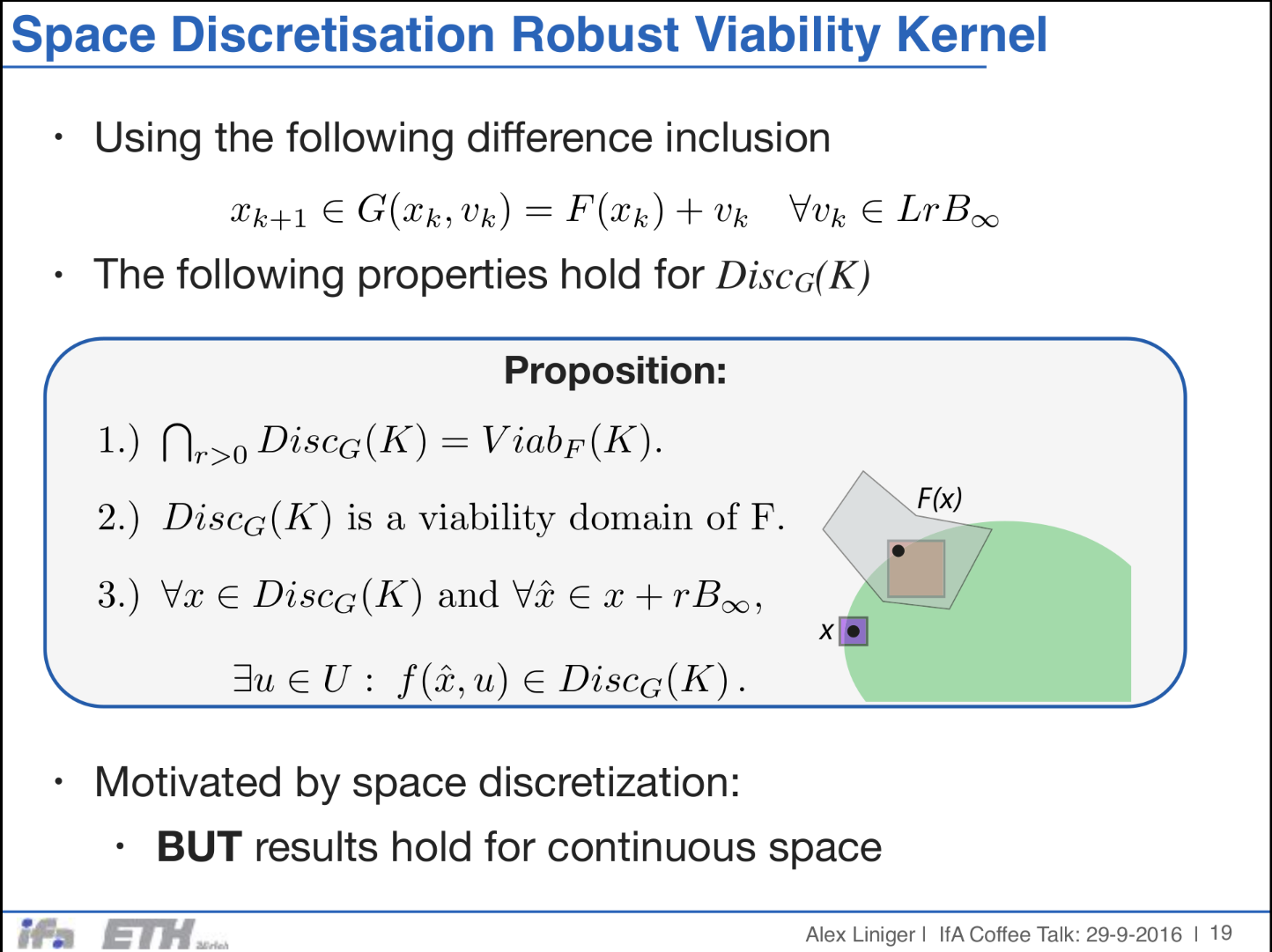
IfA Coffee Talk (ETH Zurich), 2016
Slides
Homepage Template
This homepage is based on the template by Michael Niemeyer. Checkout his github repository for instructions on how to use it.